AN230264 Getting started with PSOC™ HV PA family
About this document
Scope and purpose
AN230264 briefly introduces you to PSOC™ high-voltage (HV) precision analog (PA) family, an Arm® Cortex®-M0+ based microcontroller. This application note also guides you to set up the PSOC™ HV PA development environment.
Intended audience
This document is intended for anyone using PSOC™ HV PA family MCUs.
Introduction
This application note provides an overview of the device feature set, and describes the development environment and tools to get started with the CY8C41xxLCE-HV4xx series from the PSOC™ HV PA family. PSOC™ HV PA is a fully integrated programmable embedded system for battery monitoring and management. The system features an Arm® Cortex® M0+ processor with programmable and reconfigurable analog and digital blocks. The PSOC™ HV PA will be offered in a 32-QFN package with wettable flanks. To get a better understanding of the functionality described and terminology used in this application note, see "Section A: Overview" of the architecture technical reference manual (architecture TRM)
2
.
Feature set
PSOC™ HV PA is a fully integrated programmable embedded system for battery monitoring and management. The system features an Arm® Cortex® M0+ processor, and programmable and reconfigurable analog and digital blocks.
PSOC™ HV PA devices have these characteristics:
High-performance, 24 to 49.152-MHz Arm® Cortex® M0+ CPU with MPU and DMA controller
Precision analog channel subsystem (PACSS)
High voltage subsystem (tolerant up to 42 V)
Integrated LIN transceiver
High-precision clock sources
Configurable Timer Counter PWM (TCPWM) block
Configurable Serial Communication Block (SCB) with I2C, SPI, UART, and LIN slave operating modes
Low-power operating modes: Sleep and Deep Sleep
Functional safety for ASIL-B according to ISO 26262
Automotive Electronics Council (AEC) AEC-Q100 qualified
shows the major components of the PSOC™ HV PA architecture.
Figure 1. PSOC™ HV PA block diagram
Function summary
32-bit CPU subsystem
Up to 49.152-MHz Arm® Cortex® M0+ CPU with MPU and DMA controller
Up to 128 KB of code flash with ECC
Up to 8 KB of SRAM with ECC
Up to 8 KB of data flash with ECC
Precision analog channel subsystem (PACSS)
Two precision delta-sigma ADCs (16-20+ bits)
Current channel with automatic gain
Voltage channel
Temperature and diagnostic channels
Digital filtering, accumulators, and threshold comparisons on all channels
High-voltage subsystem
Operates directly off 12 V/24 V battery (tolerant up to 42 V)
Integrated LIN transceiver
HV input divider for voltage channel
Functional safety for ASIL-B
Development process of ISO 26262 for ASIL B
Memory protection unit (MPU)
Challenge-response watchdog timer (CRWDT)
Overvoltage protection (OVP) and brownout detection (BOD)
Hardware error correction (SECDED ECC)
Analog diagnostics
Timing and pulse-width modulation
Four 16-bit TCPWM blocks
Center-aligned, edge, and pseudo-random modes
Quadrature decoder
Clock Sources
±2% up to 49.152 MHz internal main oscillator (IMO)
±1% 2 MHz High-precision oscillator (HPOSC)
40-kHz Internal low-speed oscillator (ILO)
±5% or ±7% 32-kHz precision low-power oscillator (PILO) based on the part number
Communication
SCBs with re-configurable I2C, SPI, UART, or LIN slave
LIN interface compliant with LIN 2.2 A and ISO 17987 standards
Up to 8 GPIOs
Package
32-QFN with wettable flanks (6 x 6 mm)
Development environment and tools
Evaluation board
The CYHVPA-128K-32-001 Evaluation Board (
Figure 2
) provides access to all peripherals, resulting in a fully featured evaluation platform. CYHVPA-128K-32-001 has Arm® standard MIPI 10-pin / 20-pin connectors for the debug interface by third-party interfaces, and Infineon KitProg3 low-level communication interface for programming and debugging. The evaluation board can be used for the development of software. For more information on board details, see the PSOC™ HV PA Evaluation Board user guide
4
.
Figure 2. CYHVPA-128K-32-001 Evaluation Board - top view
shows the CYHVPA-128K-32-001 Evaluation Board block diagram.
Figure 3. CYHVPA-128K-32-001 Evaluation Board block diagram
CYHVPA-128K-32-001 board connections
CY8C4147LCE-HV413 (U3) | Connection/component | |
|---|---|---|
Pin | Pin name | |
1 | VDDA | Internal analog power (3.3 V): 0.15 μF capacitor |
2 | VSSA | Analog GND |
3 | RSH2 | 100 μ / 50 μΩ shunt resistor |
4 | RSH | 100 m / 75 m / 50 m / 4.02 Ω shunt resistor |
5 | RSL | 100 m / 75 m / 50 m / 4.02 Ω shunt resistor |
6 | RSL2 | 100 μ / 50 μΩ shunt resistor |
7 | VSSA | Analog GND |
8 | VREFH | 0.47 μF capacitor + side |
9 | VREFL | 0.47 μF capacitor - side |
10 | VTEMP_RET | Thermistor or potentiometer |
11 | VTEMP | Thermistor or potentiometer |
12 | VTEMP_SUP | 33 kΩ resistor |
13 | VSSD | Digital GND |
14 | XRES | Reset switch / program connector |
15 | P0[7] | SWDCLK for programming |
16 | P0[6] | SWDIO for programming |
17 | P0[5] | User push switch / I/O header |
18 | P0[4] | User DIP switch / I/O header |
19 | P0[3] | User LED (green) / I/O header |
20 | P0[2] | User LED (red) / I/O header |
21 | P0[1] | I2C SDA / UART TX / I/O header |
22 | P0[0] | I2C SCL / UART RX / I/O header |
23 | VCCD | Internal digital power (1.8 V): 0.15 μF capacitor |
24 | VDDD | Internal digital power (3.3 V): 0.1 μF, 3.3 μF capacitors |
25 | VSSD | Digital GND |
26 | VSSL | LIN GND |
27 | NC1 | |
28 | LIN | LIN connector |
29 | NC2 | |
30 | VDIAG | VBAT voltage sensing with 2.2 kΩ resistor (for diagnostic) |
31 | VSENSE | VBAT voltage sensing with 2.2 kΩ resistor |
32 | VBAT | 12 V power supply input |
EPAD | Heat pad (GND) | |
Connection diagram with tools
PSOC™ HV PA has an SWD interface to connect with third-party debuggers. The debug pin of SWD is shared with the GPIO port (P0[6] and P0[7]). For more information, see
AN230265 - Hardware design guide for PSOC™ HV PA family
.
Figure 4
and
Figure 5
show an example of the basic connection for PSOC™ HV PA devices. Note that the external resistors are optional.
Figure 4. Basic connection diagram of MIPI 10-pin connector
Figure 5. Basic connection diagram of MIPI 20-pin connector
Automotive Peripheral Driver Library (AutoPDL)
Automotive Peripheral Driver Library (AutoPDL) provides ISO 26262-compliant low-level drivers for all PSOC™4 HV peripherals.
The development environment officially supported by AutoPDL is IAR EWARM. To use EWARM, obtain the appropriate license. See
Peripheral drivers
for information regarding the software and license.
CPU (CM0+) startup sequence for PSOC™
HV PA
The following steps are involved in the device startup sequence:
System reset (at 0x0000 0000)
CM0+ in SROM/boot
Device in privilege mode
Perform trimming of the device based on the 64-bit key
SWD initialized
APIs executed from Arm® CM0+ NMI
APIs for the flash program, erase, and read
APIs to retrieve data from privilege registers
Transfer control to the user program
Device in user mode
CM0+ executes the user application from the code flash region
The following steps are involved in the application startup sequence:
System reset (at 0x0000 0000).
CM0+ executes "SystemInit"
Disables WDT
Applies flash wait states
Clock selection
Enables generic system IRQ
Continues execution of CM0+ user application
Startup flow example
The application startup sequence process is executed after the boot process completes. In the boot process, according to the lifecycle stage, protection status and debug access restriction settings are mainly performed, and application authentication is performed. In the application startup sequence process, initial settings necessary for program execution such as disabling the WDT, applying flash wait state, and clock settings are completed, and then execution jumps to the main routine. CM0+ executes the boot code after reset.
describes the PSOC™ HV PA device startup flow.
Figure 6. Device startup flow
Note: See the architecture TRM 2 for more details on lifecycle stages and protection bits.
Sample code
Code Listing 1 Sample code for CM0+ startup
and
Code Listing 2 Sample code for CM0+ main function
show a sample code for the CM0+ startup and main function respectively.
Code Listing 1 Sample code for CM0+ startup
;************************************************************************
;* Start-up Code
;************************************************************************
THUMB
PUBWEAK Reset_Handler
SECTION .text:CODE:REORDER:NOROOT(2)
Reset_Handler:
; Disable global interrupts
CPSID I
; Update Vector Table Offset Register with address of user ROM table
; (will be updated later to user RAM table address in C startup code)
LDR r0, =__vector_table
LDR r1, =VTOR
STR r0, [r1]
DSB
; Initialize ECC of startup stack (needed for local variables in C startup code) by processing 8 bytes per loop iteration,
; Prerequisite: Stack Pointer (SP) has not been modified (from the vector table init value) by above code (otherwise code must be adapted)
MOVS r0, #0 ; clear value
MOVS r1, #0 ; clear value
LDR r2, Cy_u32StartupStackStartAddress
startup_stack_ecc_init_loop:
STM r2!, (r0, r1)
CMP r2, sp
BNE startup_stack_ecc_init_loop
; Call C startup code (no ANSI C context established yet!)
LDR r7, =Startup_Init
BLX r7
; Initialize data sections
LDR r7, =__iar_data_init3
BLX r7
LDR r7, =__iar_program_start
BLX r7
; Note: Control flow does not necessarily return here.
; On some tool-chains (e.g. IAR) control flow will never return from
; the system library.
Cy_Main_Exited:
B Cy_Main_Exited
Code Listing 2 Sample code for CM0+ main function
#include "intrinsics.h" /* To use IAR embedded function /
#include "startup.h"
#include "bb_bsp.h"
#include "cy_common_def.h"
#include "cy_error_callout.h"
#include "cy_gpio.h"
#include "cy_sysclk.h"
#include "cy_syslib.h"
int main(void)
(
uint8 flag = 1;
SystemInit();
__enable_interrupt(); / Enable global interrupts. /
/ Initialize USER LED1 port/pin /
Cy_Gpio_SetPinMode(CY_USER_LED1_PORT_IDX, CY_USER_LED1_PIN, CY_USER_LED1_MUX);
Cy_Gpio_SetDriveMode(CY_USER_LED1_PORT_IDX, CY_USER_LED1_PIN,
CY_GPIO_DRIVE_MODE_STRONG);
/ Initialize USER LED2 port/pin */
Cy_Gpio_SetPinMode(CY_USER_LED2_PORT_IDX, CY_USER_LED2_PIN, CY_USER_LED2_MUX);
Cy_Gpio_SetDriveMode(CY_USER_LED2_PORT_IDX, CY_USER_LED2_PIN,
CY_GPIO_DRIVE_MODE_STRONG);
for(;;)
( // Wait 0.05 [s]
Cy_SysLib_DelayUs(50000);
switch(flag)
(
case 1:
Cy_Gpio_Inv(CY_USER_LED1_PORT_IDX, CY_USER_LED1_PIN);
flag = 2;
break;
case 2:
Cy_Gpio_Inv(CY_USER_LED2_PORT_IDX, CY_USER_LED2_PIN);
flag = 1;
break;
default:
Cy_Gpio_Inv(CY_USER_LED1_PORT_IDX, CY_USER_LED1_PIN);
break;
)
)
)
Peripheral drivers
Peripheral drivers are a set of firmware drivers that provide APIs for accessing hardware. These APIs perform initialization and control activities of each peripheral.
lists the peripheral drivers that Infineon provides for SDL, and
Table 3
lists the device-specific middleware.
No. | Driver | Description | API functionality |
|---|---|---|---|
1 | ADC | Analog to Digital Converter (PACSS) | Manage ADC operations |
2 | CPU | CPU driver | Enable CPU-specific features |
3 | DMA | Direct Memory Access | Perform memory-to-memory (M-DMA) and peripheral-to-memory (P-DMA) (and vice versa) operations |
4 | FLASH | Flash | APIs to handle flash memory |
5 | GPIO | General Purpose I/O Ports | Configure and access device input/output pins |
6 | LIN | Local Interconnect Network | Provide master and slave data transfer capabilities |
7 | SCB | Serial Communication Block | Manage serial communication as I2C, SPI, or UART |
8 | SYSCLK | System Clock | Provide APIs to control and read the status of various clocking capabilities of the device |
9 | SYSINT | System Interrupt | Manage interrupts and exceptions, in conjunction with the CMSIS core NVIC API |
10 | SYSLIB | System Library | Utility functions to handle delays, register read/write, asserts, silicon unique ID, and more |
11 | SYSPM | System Power Modes | Control device power modes |
12 | SYSRESET | System Reset | Provide APIs for reading reset reasons and clearing them |
13 | SYSTICK | Systick Timer | Manage a 24-bit down-counter timer |
14 | SYSWDT | Free-running Watchdog timer | Provide control and status capabilities |
15 | TCPWM | Timer Counter PWM | Manage a 16- or 32-bit periodic counter, PWM, quadrature decoder, shift register |
16 | TRIGMUX | Trigger Multiplexer | Manage the multiplexing of trigger outputs to specific trigger inputs across multiple peripherals |
No. | Middleware | Description | API functionality |
|---|---|---|---|
1 | COM | UART Com Configuration | UART configuration for ADC example projects |
2 | ADC | PACSS/ADC Counts to Volts | APIs for converting ADC counts to volts and millivolts |
Example usage of AutoPDL with IAR
Environment for AutoPDL
This section describes the operation with PSOC™ HV PA devices with AutoPDL as an example.
AutoPDL Operational Conditions:
CPU : PSOC™ HV PA devices (32-QFN)
Target board : CYHVPA-128K-32-001 Evaluation Board
IDE : IAR Embedded Workbench for Arm® 8.50.10
ICE : IAR I-jet Debugger or onboard KitProg3
Install IAR Embedded Workbench and AutoPDL
Install IAR Embedded Workbench 8.50.10 in advance and ensure that the licenses are properly enabled.
The following sections provide information on the installation procedures and licensing details for AutoPDL.
Download AutoPDL package and license
Follow these steps to download AutoPDL and get the License.
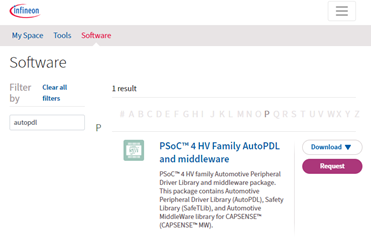
Go to
Infineon Developer Center
.
Under
Software
, find
PSOC™ 4 HV Family AutoPDL and middleware
and click on
Request
to get access to the AutoPDL software.
Once the order request is approved, you will receive an email from Infineon Developer Center (
). Product installer key (
License Key
) and a
link to download
the software will be included in the email.
Figure 7. Request access to PSOC™ 4 HV Family AutoPDL and middleware
Standard installation procedure
After you download the software and extract the archive, follow the instructions to install AutoPDL.
AutoPDL Middleware package
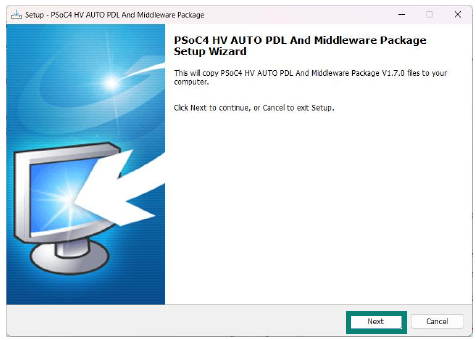
Run the
PSOC4HV_AutoPDL-MW_V1.7.0_BulkInstall.bat
in the
\WWxxxx_PSOC4HV_AutoPDL-MW_Vx.x.x
folder. After the setup wizard appears, click
Next
.
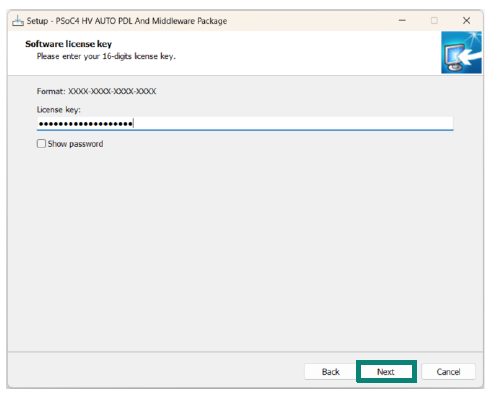
Enter the
License key
which is including in email from Infineon Developer Center and click
Next
.
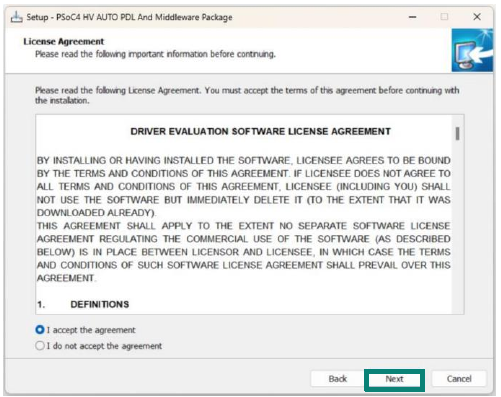
Read the license agreement. Select I accept the agreement and click
Next
.
Read the information and click
Next
.
Select the install folder and click
Next
to continue.
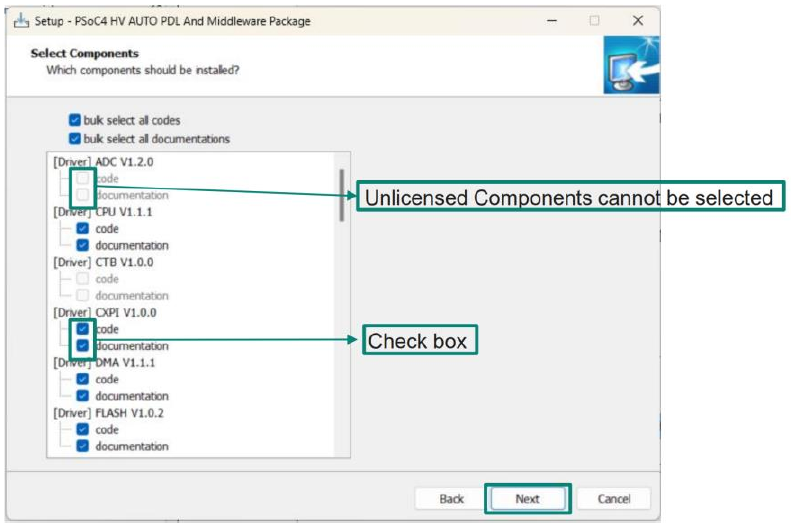
Select the components that you want to install and click
Next
to continue.
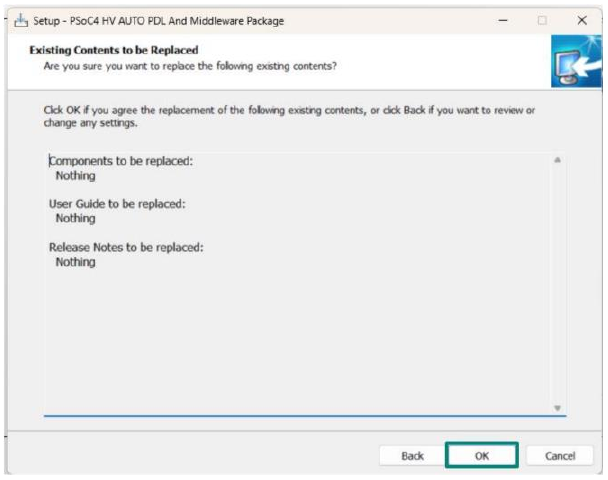
The Auto PDL and middleware package installer checks for the existing Auto PDL drivers/middleware and documents in the installation folder. The existing drivers/middleware and documents are displayed. If you want to replace the existing contents, click
OK
.
Confirm the details and click
Install
.
Read the Precautions for Use and click
Next
.

Click
Finish
to complete the installation.
Device Header Files
The setup wizard for device header files is automatically appeared.
In the setup wizard, click
Next
.
Read the license agreement. Select
I accept the agreement
and click
Next
.
Read the information and click
Next
.
Select the install folder same as selected while installing the Middleware. Click
Next
to continue.
Select the HV Device for which you want to install headers and click
Next
to continue.
Check your selection and click on
install
.
Click
Finish
to complete the installation.
Code Examples
The setup wizard for code examples automatically appear.
In the setup wizard, click
Next
.
Read the license agreement. Select
I accept the agreement
and click
Next
.
Read the information and click
Next
.
Select the install folder same as selected while installing the middleware and device header. Click
Next
to continue.
Select the HV Device for which you want to install code example from the drop down as shown in the following figure. Click
Next
to continue.
Check your selection and click on
install
.
Click
Finish
to complete the installation.
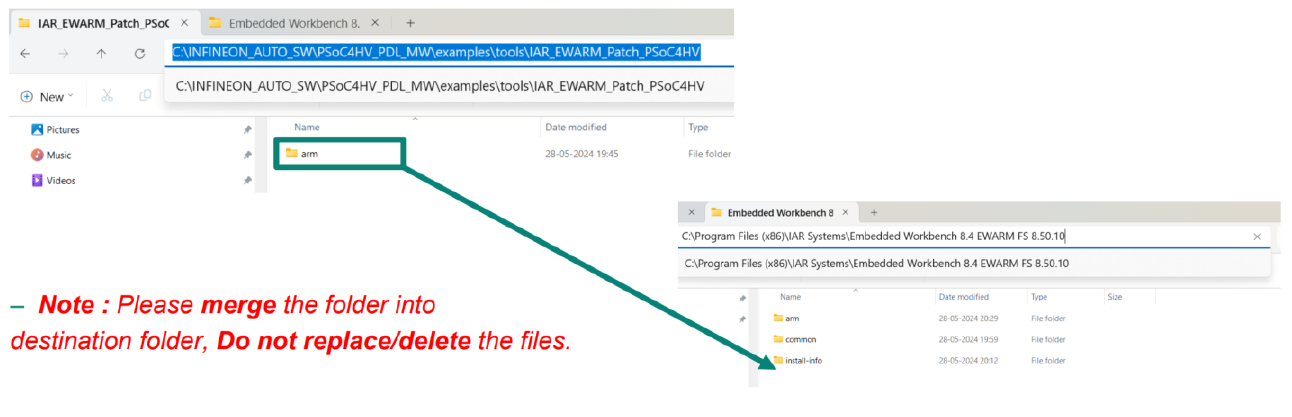
IAR EWARM flash patch configuration update
Copy and paste (or replace) the flash loader files (
arm
folder) to the IAR installation folder.
Copy from AutoPDL installation:
C:\INFINEON_AUTO_SW\PSOC4HV_PDL_MW_Vxxxxx\examples\Tools\IAR_EWARM_Patch_PSOC4HV
Paste (or replace) to IAR installation:
C:\Program Files (x86)\IAR Systems\Embedded Workbench 8.4 EWARM FS 8.50.10
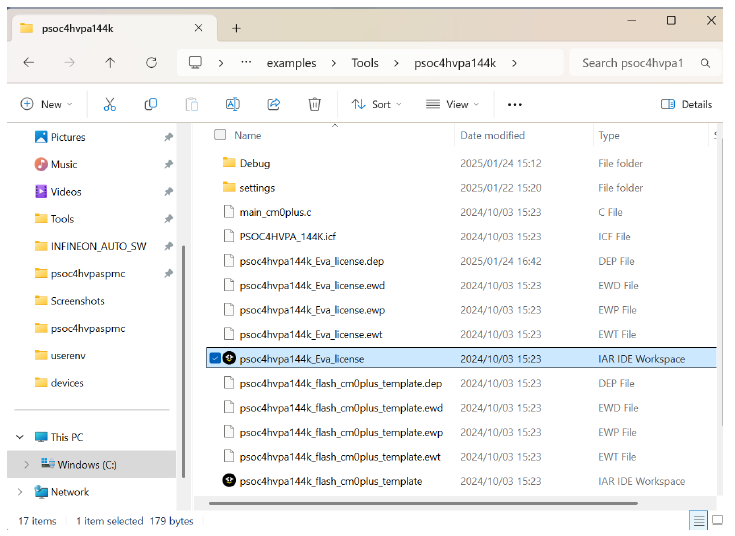
Example usage of AutoPDL
Navigate to the AutoPDL folder and open the
PSOC4hvpa144k_Eva_license.eww
file.
C:\INFINEON_AUTO_SW\PSOC4HV_PDL_MW_Vxxxxx\examples\Tools\PSOC4hvpa144k
Note: If you use the source code license, open the PSOC4hvpa144k_flash_cm0plus_template.eww.
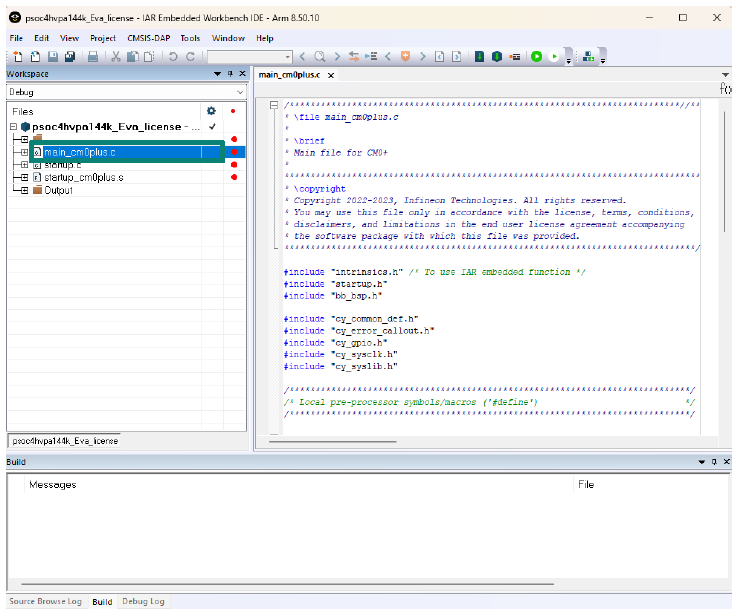
Double-click on
main_cm0plus.c
in the left panel. Details of the sample code are shown (see
Code Listing 2
).
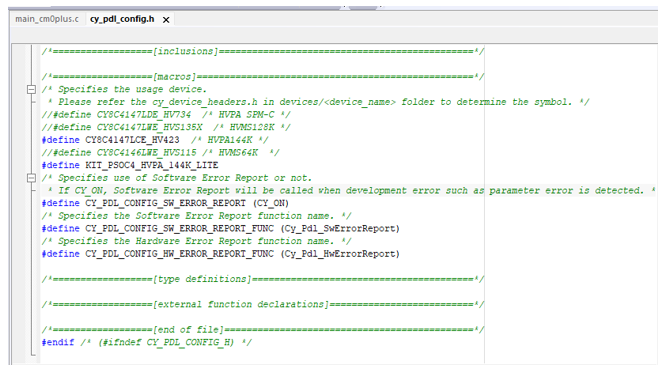
Write the Define value for your target device.
e.g.
C:\INFINEON_AUTO_SW\PSOC4HV_PDL_MW\source\userenv\cy_pdl_config.h
The device names supported by the standard evaluation board are as follows:
HVPA144K: CY8C4147LCE_HV423
(Evaluation board) or
CY8C4147LCE_HV413
(Lite-Kit Board)
HVMS64K: CY8C4146LWE_HVS115
HVMS128K: CY8C4147LWE_HVS135X
HVPASPM-C: CY8C4147LDE_HV734
If you are using a Lite-Kit board, please also add the following definitions.
HVPA144K: KIT_PSOC4_HVPA_144K_LITE
HVMS128K: KIT_PSOC4_HVMS_128K_LITE
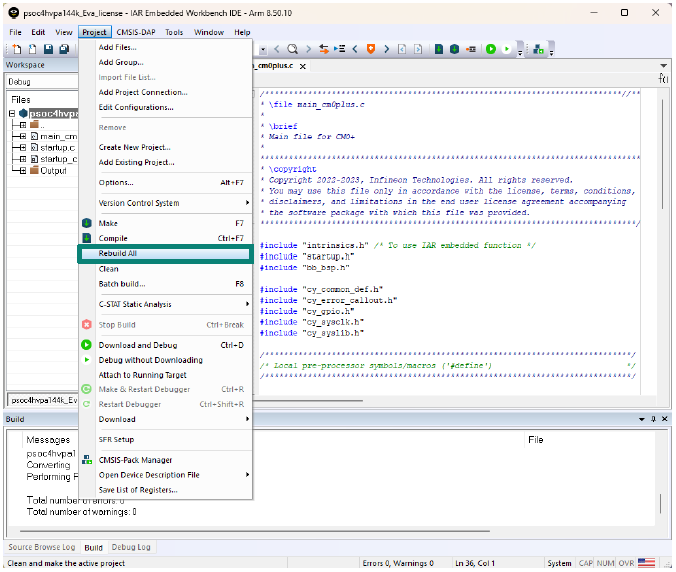
If you are using HVPA-144K_LITE, change it as follows:
Select
Project
>
Rebuild All
to build the project.
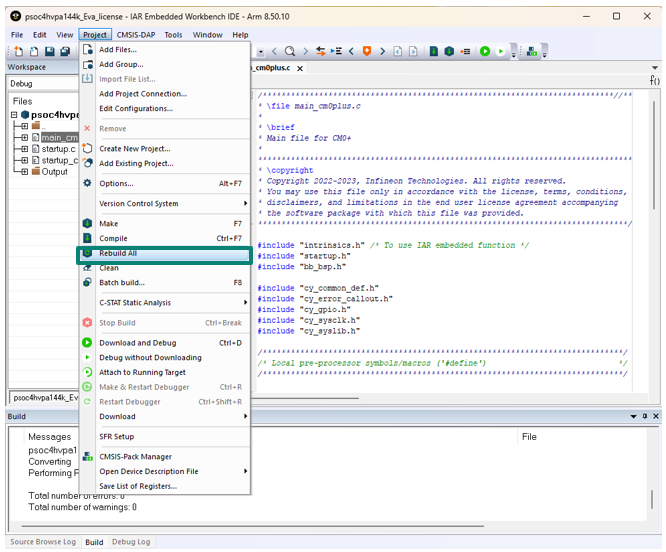
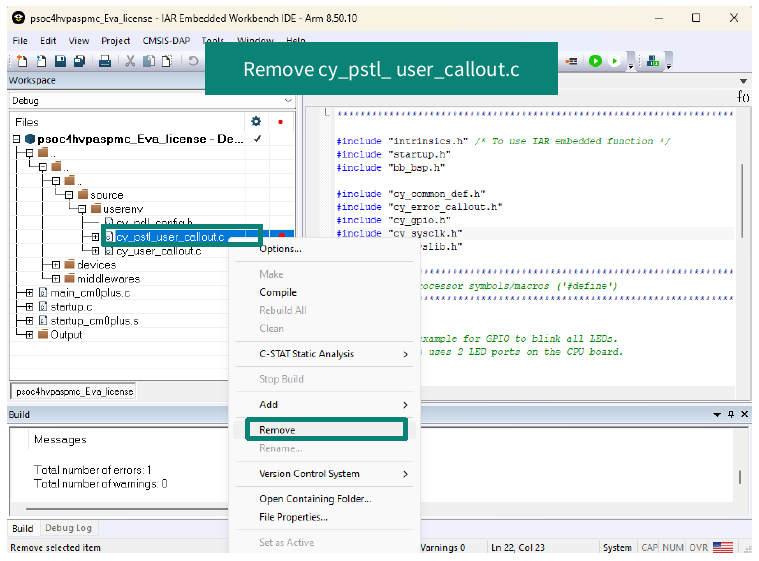
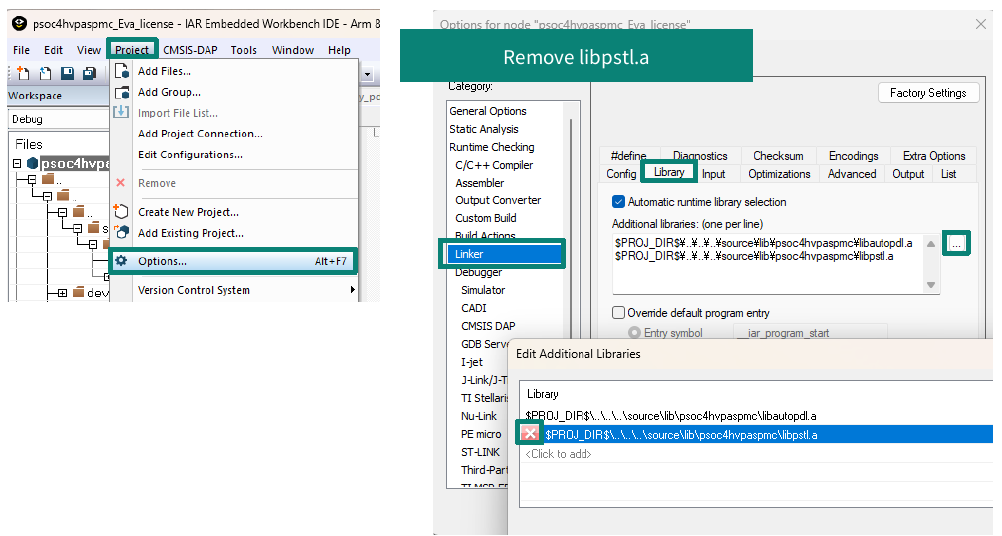
Note: If you didn’t request a SafeTlib license, two errors will occur. If you see the errors, remove the cy_pstl_user_callout.c and libpstl.a files and then select Rebuild all. To remove the cy_pstl_user_callout.c file, right-click the file and then click Remove. To remove the libpstl.a file, navigate to Project > Options > Linker > Library tab and click the ellipses button next to the Additional libraries pane. Select libpstl.a and click remove (×).
Connect the USB cable to the J4 and 12V wall Adapter to the J22 of the CYHVPA-128K-32-001 Evaluation Board with the power supply (See
Figure 8
). See the PSOC™ HV PA Evaluation Board user guide
3
for more detailed information.
Figure 8. USB cable connection
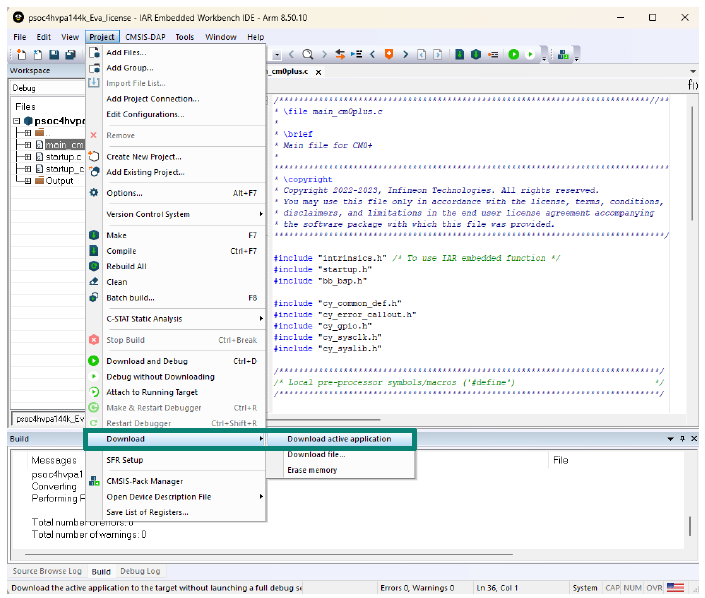
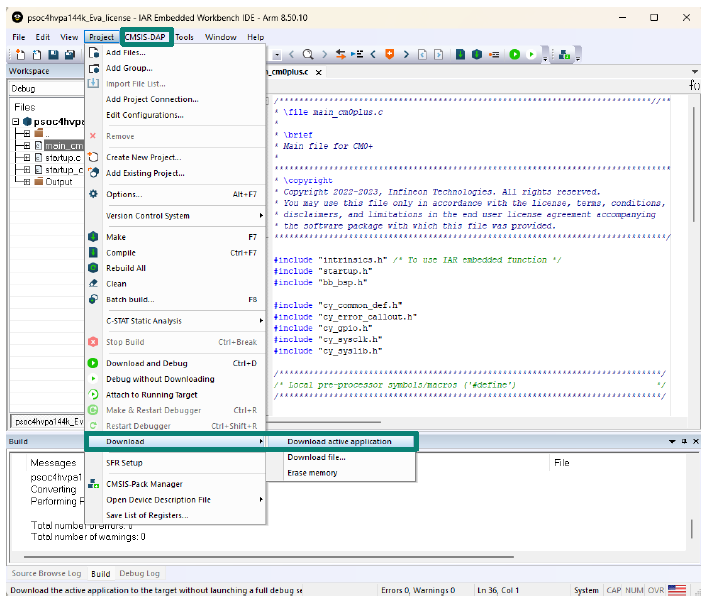
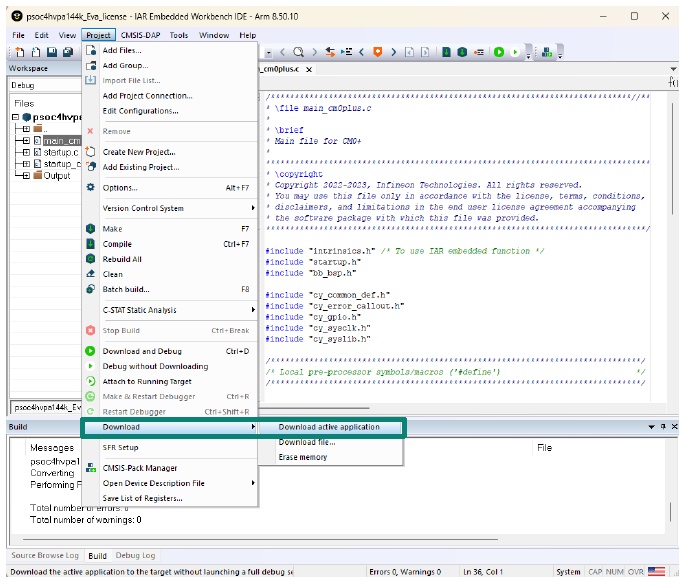
Download the project to PSOC™ 4 HVPA-144K device by selecting
Project > Download > Download active application
.
Push the reset switch (SW2) on the CYHVPA-128K-32-001 Evaluation Board and then confirm that the LED D6 and D7 are blinking.
Download the application using the IAR I-JET debugger
Note: If you do not have the IAR I-jet Debugger, then skip Steps 8 to 10.
Connect the IAR I-jet Debugger to either J3 (MIPI 20-pin) or J5 (MIPI 10-pin) of the CYHVPA-128K-32-001 Evaluation Board with power supply (See
Figure 9
). See the PSOC™ HV PA Evaluation Board user guide
4
for more detailed information.
Figure 9. Connection of IAR I-jet Debugger
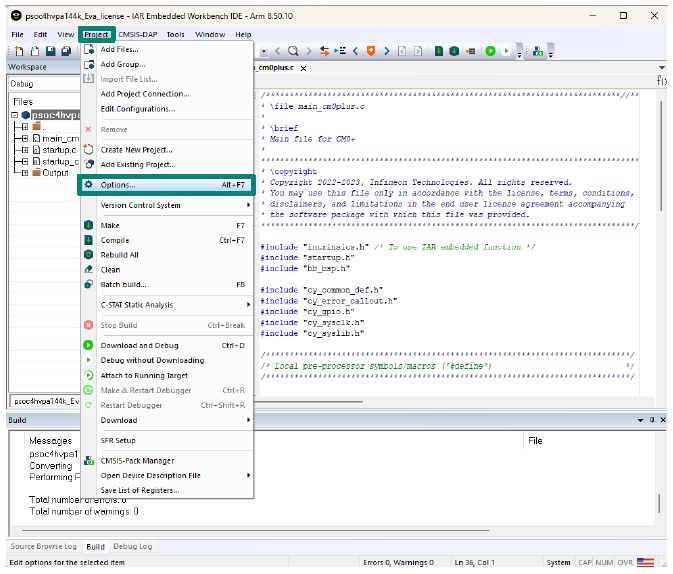
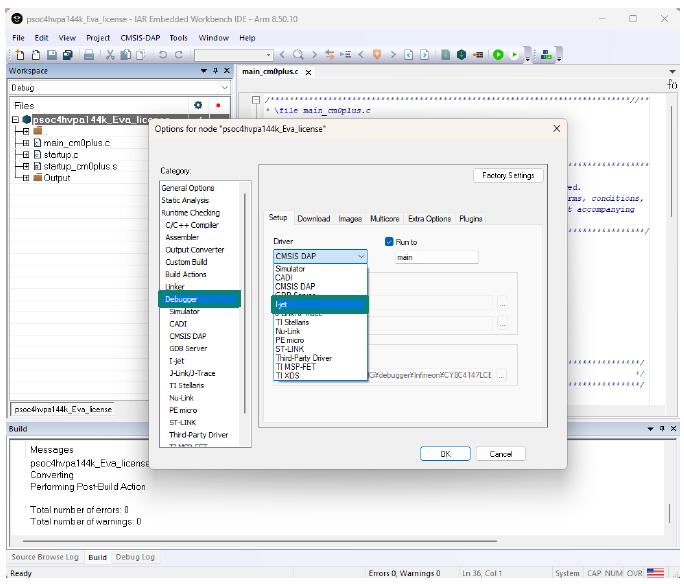
Note: Please check I-jet is set for Debugger. In case of the CMSIS DAP program, the menu name shows CMSIS DAP. If it isn’t, navigate to Project > Options > Debugger and select I-jet at Driver.
Download the project to PSOC™ HV PA device by selecting
Project >Download > Download active application
.
Push the reset switch (SW2) on the CYHVPA-128K-32-001 Evaluation Board and then confirm that the LED D6 and D7 is blinking.
Download the application using the onboard KitProg3
Connect the USB cable to the J4 of the CYHVPA-128K-32-001 Evaluation Board with the power supply (See
Figure 10
). See the PSOC™ HV PA Evaluation Board user guide
4
for more detailed information.
Figure 10. USB cable connection
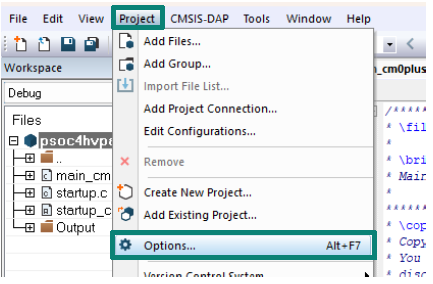
Select
Project > Options…
to change the debugger settings.
Select
CMSIS DAP
from Options and select the
Interface
tab. Change the settings as shown in:
Probe config -> Auto
Interface speed -> 2MHz
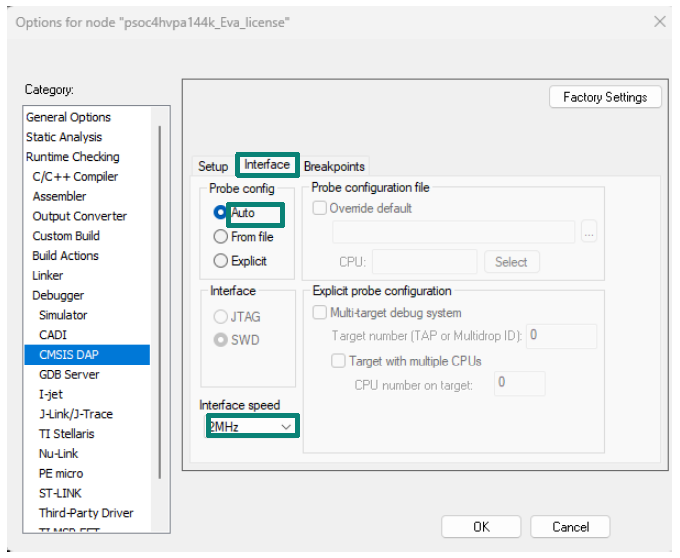
Click
OK
and re-select
Project > Rebuild All
to build the project.
Download the project to PSOC™ HV PA device by selecting
Project > Download > Download active application
.
Push the reset switch (SW2) on the CYHVPA-128K-32-001 Evaluation Board and then confirm that the LED D6 and D7 is blinking.
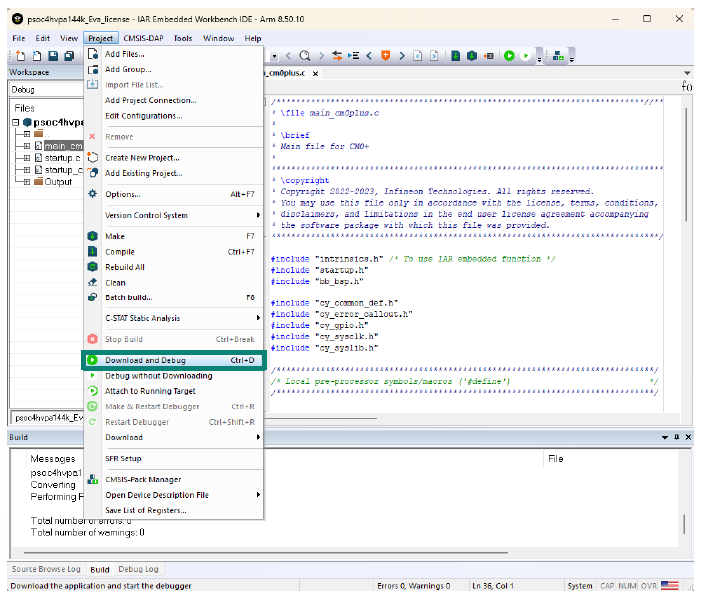
To debug the project using either IAR I-JET debugger or onboard KitProg3 (CMSIS DAP), select
Project > Download and Debug
. For more information on debugging, see the IAR EWARM IDE project management and building guide
5
.
Other sample codes
The other code examples are in the
examples
folder.
Go to any code sample folder (e.g.,
) and copy the
main_cm0plus.c
file in the folder.
Navigate to
PSOC4HV_PDL_MW_Vxxxxx\examples\Tools\PSOC4hvpa144k
and replace the copied
main_cm0plus.c
file.
From the same folder, open
PSOC4hvpa144k_Eva_license.eww
(or
PSOC4hvpa144k_flash_cm0plus_template.eww
for source file license) to open the IAR EWARM sample project.
Rebuild and download the project to the board. See the
C:\INFINEON_AUTO_SW\PSOC4HV_PDL_MW_Vxxxxx\examples\readme.pdf
file of the sample codes for a detailed explanation of the use case.
Development tools
Vender | Emulators/probes | Compiler |
|---|---|---|
IAR Systems | I -JET Debugger Onboard KitProg3 | EWARM (8.50.10) |
Flash programming tools
lists the supported flash programming tools. Infineon MiniProg4 programmer is for development purposes. For mass production purposes, a JTAG programmer from a third-party is suitable.
Vender | Flash programmer | Software |
|---|---|---|
Infineon | MiniProg4 | Infineon Auto Flash Utility |
KitProg3 |
Note: CYHVPA-128K-32-001 has the Cortex® SWD debug connector. SWD is compatible with MiniProg4.
lists the pin assignment for Cortex® debug connector.
Pin | Signal |
|---|---|
1 | VDDD |
2 | SWDIO |
3 | GND |
4 | SWDCLK |
5 | GND |
6 | SWO (option) |
7 | KEY |
8 | NC |
9 | GND detect |
10 | nRESET |
Summary
This application note guided you to set up the PSOC™ HV PA development environment. Infineon provides an evaluation board and a wealth of sample software to help you get started with the PSOC™ HV PA family. To evaluate the CYHVPA-128K-32-001 Evaluation Board, contact your sales representative or
Infineon Technical Support
.
Glossary
Terms | Description |
|---|---|
A/D converter | Analog to Digital Converter |
ADC | Analog to Digital Converter |
AHB | Advanced High-Performance Bus |
API | Application Programming Interface |
BOD | Brown-Out Detectors |
CM0+ | Arm® Cortex®-M0+ (processor core name) |
CPU | Central Processing Unit |
CPUSS | CPU Subsystem |
DAP | Debug Access Port |
DMA | Direct Memory Access |
DMAC | DMA Controller |
DW | Data Wire |
ECC | Error Correction Code (safety) |
GPIO | General Purpose I/O |
HV | High-Voltage |
I/O | Input or Output |
IAR | IAR Systems (Company name) |
IOSS | I/O Sub-System |
IRC | Interrupt Controller |
IRQ | Interrupt Request |
ISR | Interrupt Service Routine |
LIN | Local Interconnect Network |
MCU | Microcontroller Unit |
MIPI | Mobile Industry Processor Interface |
MPU | Memory Protection Unit |
NMI | Non-Maskable Interrupt |
PA | Precision Analog |
PACSS | Precision Analog Channel Subsystem |
POR | Power On Reset |
PWM | Pulse Width Modulation |
RAM | Random Access Memory |
ROM | Read-Only Memory |
SCB | Serial Communication Block |
SDL | Sample Driver Library |
SPI | Serial Peripheral Interface |
SRAM | Static RAM |
SRSS | System Resource Subsystem |
SWD | Serial Wire Debugging |
TCPWM | Timer, Counter and PWM |
WDT | Watchdog Timer |
References
The following are the PSOC™ HV PA family series application notes, datasheets, and technical reference manuals. Contact
Infineon Technical Support
to obtain these documents and sample driver library.
002-28660: PSOC™ HV PA-144K datasheet
002-29223: PSOC™ HV PA architecture technical reference manual (TRM)
002-29238: PSOC™ HV PA registers technical reference manual (TRM)
002-29984: PSOC™ HV PA Evaluation Board user guide
IAR EWARM IDE project management and building guide
002-31481: PSOC™ 4 HVPA-144K Safety Manual
Revision history
Document revision | Date | Description of changes |
|---|---|---|
** | 2020-11-24 | Initial release |
*A | 2023-04-07 | Updated all sections to support the latest silicon |
*B | 2023-04-19 | Template update; no content update |
*C | 2025-02-14 | Changed to use AutoPDL. |
Trademarks
PSOC™, formerly known as PSoC™, is a trademark of Infineon Technologies. Any references to PSoC™ in this document or others shall be deemed to refer to PSOC™.