XMC1100 AB-Step
XMC1000 Family
Microcontroller Series for Industrial Applications
ARM®
Cortex®-M0
32-bit processor core
Datasheet
About this Document
This datasheet is addressed to embedded hardware and software developers. It provides the reader with detailed descriptions about the ordering designations, available features, electrical and physical characteristics of the XMC1100 series devices.
The document describes the characteristics of a superset of the XMC1100 series devices. For simplicity, the various device types are referred to by the collective term XMC1100 throughout this document.
XMC1000 Family User Documentation
The set of user documentation includes:
- Reference Manual
describes the functionality of the superset of devices.
Datasheets
list the complete ordering designations, available features and electrical characteristics of derivative devices.
Errata Sheets
list deviations from the specifications given in the related Reference Manual or Datasheets. Errata Sheets are provided for the superset of devices.
Attention:
Please consult all parts of the documentation set to attain consolidated knowledge about your device.
Application related guidance is provided by Users Guides and Application Notes .
Please refer to http://www.infineon.com/xmc1000 to get access to the latest versions of those documents.
Summary of Features
The XMC1100 devices are members of the XMC1000 Family of microcontrollers based on the ARM Cortex-M0 processor core. The XMC1100 series devices are designed for general purpose applications.
Figure 1. System Block Diagram
CPU Subsystem
CPU Core
High-performance 32-bit ARM Cortex-M0 CPU
Most 16-bit Thumb and subset of 32-bit Thumb2 instruction set
Single cycle 32-bit hardware multiplier
System timer (SysTick) for Operating System support
Ultra low power consumption
Nested Vectored Interrupt Controller (NVIC)
Event Request Unit (ERU) for processing of external and internal service requests
On-Chip Memories
8 kbytes on-chip ROM
16 kbytes on-chip high-speed SRAM
up to 200 KB on-chip Flash program and data memory
On-Chip Peripherals
Two Universal Serial Interface Channels (USIC), usable as UART, double-SPI, quad-SPI, IIC, IIS and LIN interfaces
A/D Converters
up to 12 analog input pins and channels
12-bit analog to digital converter
Capture/Compare Units 4 (CCU4) for use as general purpose timers
Window Watchdog Timer (WDT) for safety sensitive applications
Real Time Clock module with alarm support (RTC)
System Control Unit (SCU) for system configuration and control
Pseudo random number generator (PRNG) for fast random data generation
Temperature Sensor (TSE)
Input/Output Lines With Individual Bit Controllability
Tri-stated in input mode
Push/pull or open drain output mode
Configurable pad hysteresis
Debug System
Access through the standard ARM serial wire debug (SWD) or the single pin debug (SPD) interface
A breakpoint unit (BPU) supporting up to 4 hardware breakpoints
A watchpoint unit (DWT) supporting up to 2 watchpoints
Ordering Information
The ordering code for an Infineon microcontroller provides an exact reference to a specific product. The code “XMC1<DDD>-<Z><PPP><T><FFFF>” identifies:
<DDD> the derivatives function set
<Z> the package variant
T: TSSOP
Q: VQFN
<PPP> package pin count
<T> the temperature range:
F: -40°C to 85°C
X: -40°C to 105°C
<FFFF> the Flash memory size
For ordering codes for the XMC1100 please contact your sales representative or local distributor.
This document describes several derivatives of the XMC1100 series, some descriptions may not apply to a specific product. Please see Table 1 .
For simplicity the term XMC1100 is used for all derivatives throughout this document.
Device Types
These device types are available and can be ordered through Infineon’s direct and/or distribution channels.
Derivative | Package | Flash Kbytes | SRAM Kbytes |
|---|---|---|---|
XMC1100-T016F0008 | PG-TSSOP-16-8 | 8 | 16 |
XMC1100-T016F0016 | PG-TSSOP-16-8 | 16 | 16 |
XMC1100-T016F0032 | PG-TSSOP-16-8 | 32 | 16 |
XMC1100-T016F0064 | PG-TSSOP-16-8 | 64 | 16 |
XMC1100-T016X0016 | PG-TSSOP-16-8 | 16 | 16 |
XMC1100-T016X0032 | PG-TSSOP-16-8 | 32 | 16 |
XMC1100-T016X0064 | PG-TSSOP-16-8 | 64 | 16 |
XMC1100-T038F0016 | PG-TSSOP-38-9 | 16 | 16 |
XMC1100-T038F0032 | PG-TSSOP-38-9 | 32 | 16 |
XMC1100-T038F0064 | PG-TSSOP-38-9 | 64 | 16 |
XMC1100-T038X0064 | PG-TSSOP-38-9 | 64 | 16 |
XMC1100-T038X0128 | PG-TSSOP-38-9 | 128 | 16 |
XMC1100-T038X0200 | PG-TSSOP-38-9 | 200 | 16 |
XMC1100-Q024F0008 | PG-VQFN-24-19 | 8 | 16 |
XMC1100-Q024F0016 | PG-VQFN-24-19 | 16 | 16 |
XMC1100-Q024F0032 | PG-VQFN-24-19 | 32 | 16 |
XMC1100-Q024F0064 | PG-VQFN-24-19 | 64 | 16 |
XMC1100-Q040F0016 | PG-VQFN-40-13 | 16 | 16 |
XMC1100-Q040F0032 | PG-VQFN-40-13 | 32 | 16 |
XMC1100-Q040F0064 | PG-VQFN-40-13 | 64 | 16 |
Device Type Features
The following table lists the available features per device type.
Derivative | ADC channel |
|---|---|
XMC1100-T016 | 6 |
XMC1100-T038 | 12 |
XMC1100-Q024 | 8 |
XMC1100-Q040 | 12 |
Package | VADC0 G0 | VADC0 G1 |
|---|---|---|
PG-TSSOP-16 | CH0..CH5 | – |
PG-TSSOP-38 | CH0..CH7 | CH1, CH5 .. CH7 |
PG-VQFN-24 | CH0..CH7 | – |
PG-VQFN-40 | CH0..CH7 | CH1, CH5 .. CH7 |
Chip Identification Number
The Chip Identification Number allows software to identify the marking. It is a 8 words value with the most significant 7 words stored in Flash configuration sector 0 (CS0) at address location:
1000 0F00
(MSB) -
1000 0F1B
(LSB). The least significant word and most significant word of the Chip Identification Number are the value of registers DBGROMID and IDCHIP, respectively.
Derivative | Value | Marking |
|---|---|---|
XMC1100-T016F0008 | 00011032 01CF00FF 00001F37 00000000 00000C00
00001000 00003000 201ED083 | AB |
XMC1100-T016F0016 | 00011032 01CF00FF 00001F37 00000000 00000C00
00001000 00005000 201ED083 | AB |
XMC1100-T016F0032 | 00011032 01CF00FF 00001F37 00000000 00000C00
00001000 00009000 201ED083 | AB |
XMC1100-T016F0064 | 00011032 01CF00FF 00001F37 00000000 00000C00
00001000 00011000 201ED083 | AB |
XMC1100-T016X0016 | 00011033 01CF00FF 00001F37 00000000 00000C00
00001000 00005000 201ED083 | AB |
XMC1100-T016X0032 | 00011033 01CF00FF 00001F37 00000000 00000C00
00001000 00009000 201ED083 | AB |
XMC1100-T016X0064 | 00011033 01CF00FF 00001F37 00000000 00000C00
00001000 00011000 201ED083 | AB |
XMC1100-T038F0016 | 00011012 01CF00FF 00001F37 00000000 00000C00
00001000 00005000 201ED083 | AB |
XMC1100-T038F0032 | 00011012 01CF00FF 00001F37 00000000 00000C00
00001000 00009000 201ED083 | AB |
XMC1100-T038F0064 | 00011012 01CF00FF 00001F37 00000000 00000C00
00001000 00011000 201ED083 | AB |
XMC1100-T038X0064 | 00011013 01CF00FF 00001F37 00000000 00000C00
00001000 00011000 201ED083 | AB |
XMC1100-T038X0128 | 00011013 01CF00FF 00001F37 00000000 00000C00 00001000 00021000
201ED083 | AB |
XMC1100-T038X0200 | 00011013 01CF00FF 00001F37 00000000 00000C00 00001000 00033000
201ED083 | AB |
XMC1100-Q024F0008 | 00011062 01CF00FF 00001F37 00000000 00000C00
00001000 00003000 201ED083 | AB |
XMC1100-Q024F0016 | 00011062 01CF00FF 00001F37 00000000 00000C00
00001000 00005000 201ED083 | AB |
XMC1100-Q024F0032 | 00011062 01CF00FF 00001F37 00000000 00000C00
00001000 00009000 201ED083 | AB |
XMC1100-Q024F0064 | 00011062 01CF00FF 00001F37 00000000 00000C00
00001000 00011000 201ED083 | AB |
XMC1100-Q040F0016 | 00011042 01CF00FF 00001F37 00000000 00000C00
00001000 00005000 201ED083 | AB |
XMC1100-Q040F0032 | 00011042 01CF00FF 00001F37 00000000 00000C00
00001000 00009000 201ED083 | AB |
XMC1100-Q040F0064 | 00011042 01CF00FF 00001F37 00000000 00000C00
00001000 00011000 201ED083 | AB |
General Device Information
This section summarizes the logic symbols and package pin configurations with a detailed list of the functional I/O mapping.
Logic Symbols
Figure 2. XMC1100 Logic Symbol for TSSOP-38 and TSSOP-16
Figure 3. XMC1100 Logic Symbol for VQFN-24 and VQFN-40
Pin Configuration and Definition
The following figures summarize all pins, showing their locations on the different packages.
Figure 4. XMC1100 PG-TSSOP-38 Pin Configuration (top view)
Figure 5. XMC1100 PG-TSSOP-16 Pin Configuration (top view)
Figure 6. XMC1100 PG-VQFN-24 Pin Configuration (top view)
Figure 7. XMC1100 PG-VQFN-40 Pin Configuration (top view)
Package Pin Summary
The following general building block is used to describe each pin:
Function | Package A | Package B | ... | Pad Type |
|---|---|---|---|---|
Px.y | N | N | Pad Class |
The table is sorted by the “Function” column, starting with the regular Port pins (Px.y), followed by the supply pins.
The following columns, titled with the supported package variants, lists the package pin number to which the respective function is mapped in that package.
The “Pad Type” indicates the employed pad type:
STD_INOUT (standard bi-directional pads)
STD_INOUT/AN (standard bi-directional pads with analog input)
High Current (high current bi-directional pads)
STD_IN/AN (standard input pads with analog input)
Power (power supply)
Details about the pad properties are defined in the Electrical Parameters.
Function | VQFN 40 | TSSOP 38 | VQFN 24 | TSSOP 16 | Pad Type | Notes |
|---|---|---|---|---|---|---|
P0.0 | 23 | 17 | 15 | 7 | STD_INOUT | |
P0.1 | 24 | 18 | – | – | STD_INOUT | |
P0.2 | 25 | 19 | – | – | STD_INOUT | |
P0.3 | 26 | 20 | – | – | STD_INOUT | |
P0.4 | 27 | 21 | – | – | STD_INOUT | |
P0.5 | 28 | 22 | 16 | 8 | STD_INOUT | |
P0.6 | 29 | 23 | 17 | 9 | STD_INOUT | |
P0.7 | 30 | 24 | 18 | 10 | STD_INOUT | |
P0.8 | 33 | 27 | 19 | 11 | STD_INOUT | |
P0.9 | 34 | 28 | 20 | 12 | STD_INOUT | |
P0.10 | 35 | 29 | – | – | STD_INOUT | |
P0.11 | 36 | 30 | – | – | STD_INOUT | |
P0.12 | 37 | 31 | 21 | – | STD_INOUT | |
P0.13 | 38 | 32 | 22 | – | STD_INOUT | |
P0.14 | 39 | 33 | 23 | 13 | STD_INOUT | |
P0.15 | 40 | 34 | 24 | 14 | STD_INOUT | |
P1.0 | 22 | 16 | 14 | – | High Current | |
P1.1 | 21 | 15 | 13 | – | High Current | |
P1.2 | 20 | 14 | 12 | – | High Current | |
P1.3 | 19 | 13 | 11 | – | High Current | |
P1.4 | 18 | 12 | – | – | High Current | |
P1.5 | 17 | 11 | – | – | High Current | |
P1.6 | 16 | – | – | – | STD_INOUT | |
P2.0 | 1 | 35 | 1 | 15 | STD_INOUT/AN | |
P2.1 | 2 | 36 | 2 | – | STD_INOUT/AN | |
P2.2 | 3 | 37 | 3 | – | STD_IN/AN | |
P2.3 | 4 | 38 | – | – | STD_IN/AN | |
P2.4 | 5 | 1 | – | – | STD_IN/AN | |
P2.5 | 6 | 2 | – | – | STD_IN/AN | |
P2.6 | 7 | 3 | 4 | 16 | STD_IN/AN | |
P2.7 | 8 | 4 | 5 | 1 | STD_IN/AN | |
P2.8 | 9 | 5 | 5 | 1 | STD_IN/AN | |
P2.9 | 10 | 6 | 6 | 2 | STD_IN/AN | |
P2.10 | 11 | 7 | 7 | 3 | STD_INOUT/AN | |
P2.11 | 12 | 8 | 8 | 4 | STD_INOUT/AN | |
VSS | 13 | 9 | 9 | 5 | Power | Supply GND, ADC reference GND |
VDD | 14 | 10 | 10 | 6 | Power | Supply VDD, ADC reference voltage/ORC reference voltage |
VDDP | 15 | 10 | 10 | 6 | Power | When VDD is supplied, VDDP has to be supplied with the same voltage. |
VSSP | 31 | 25 | – | – | Power | I/O port ground |
VDDP | 32 | 26 | – | – | Power | I/O port supply |
VSSP | Exp. Pad | – | Exp. Pad | – | Power | Exposed Die Pad The exposed die pad is connected internally to VSSP. For proper operation, it is mandatory to connect the exposed pad to the board ground. For thermal aspects, please refer to the Package and Reliability chapter. |
Port I/O Function Description
The following general building block is used to describe the I/O functions of each PORT pin:
Function | Outputs | Inputs | ||
|---|---|---|---|---|
ALT1 | ALTn | Input | Input | |
P0.0 | MODA.OUT | MODC.INA | ||
Pn.y | MODA.OUT | MODA.INA | MODC.INB | |
Figure 8. Simplified Port Structure
Pn.y is the port pin name, defining the control and data bits/registers associated with it. As GPIO, the port is under software control. Its input value is read via Pn_IN.y, Pn_OUT defines the output value.
Up to seven alternate output functions (ALT1/2/3/4/5/6/7) can be mapped to a single port pin, selected by Pn_IOCR.PC. The output value is directly driven by the respective module, with the pin characteristics controlled by the port registers (within the limits of the connected pad).
The port pin input can be connected to multiple peripherals. Most peripherals have an input multiplexer to select between different possible input sources.
The input path is also active while the pin is configured as output. This allows to feedback an output to on-chip resources without wasting an additional external pin.
Please refer to
Table 9
for the complete Port I/O function mapping.
Hardware Controlled I/O Function Description
The following general building block is used to describe the hardware I/O and pull control functions of each PORT pin:
Function | Outputs | Inputs | Pull Control | |
|---|---|---|---|---|
HWO0 | HWI0 | HW0_PD | HW0_PU | |
P0.0 | MODB.OUT | MODB.INA | ||
Pn.y | MODC.OUT | |||
By Pn_HWSEL, it is possible to select between different hardware “masters” (HWO0/HWI0, HWO1/HWI1). The selected peripheral can take control of the pin(s). Hardware control overrules settings in the respective port pin registers. Additional hardware signals HW0_PD/HW1_PD and HW0_PU/HW1_PU controlled by the peripherals can be used to control the pull devices of the pin.
Please refer to
Table 10
for the complete hardware I/O and pull control function mapping.
Function | Outputs | Inputs | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
ALT1 | ALT2 | ALT3 | ALT4 | ALT5 | ALT6 | ALT7 | Input | Input | Input | Input | Input | Input | Input | |
P0.0 | ERU0. PDOUT0 | ERU0. GOUT0 | CCU40.OUT0 | USIC0_CH0. SELO0 | USIC0_CH1. SELO0 | CCU40.IN0C | USIC0_CH0. DX2A | USIC0_CH1. DX2A | ||||||
P0.1 | ERU0. PDOUT1 | ERU0. GOUT1 | CCU40.OUT1 | SCU. VDROP | CCU40.IN1C | |||||||||
P0.2 | ERU0. PDOUT2 | ERU0. GOUT2 | CCU40.OUT2 | VADC0. EMUX02 | CCU40.IN2C | |||||||||
P0.3 | ERU0. PDOUT3 | ERU0. GOUT3 | CCU40.OUT3 | VADC0. EMUX01 | CCU40.IN3C | |||||||||
P0.4 | CCU40.OUT1 | VADC0. EMUX00 | WWDT. SERVICE_OUT | |||||||||||
P0.5 | CCU40.OUT0 | |||||||||||||
P0.6 | CCU40.OUT0 | USIC0_CH1.MCLKOUT | USIC0_CH1. DOUT0 | CCU40.IN0B | USIC0_CH1. DX0C | |||||||||
P0.7 | CCU40.OUT1 | USIC0_CH0. SCLKOUT | USIC0_CH1. DOUT0 | CCU40.IN1B | USIC0_CH0. DX1C | USIC0_CH1. DX0D | USIC0_CH1. DX1C | |||||||
P0.8 | CCU40.OUT2 | USIC0_CH0. SCLKOUT | USIC0_CH1. SCLKOUT | CCU40.IN2B | USIC0_CH0. DX1B | USIC0_CH1. DX1B | ||||||||
P0.9 | CCU40.OUT3 | USIC0_CH0. SELO0 | USIC0_CH1. SELO0 | CCU40.IN3B | USIC0_CH0. DX2B | USIC0_CH1. DX2B | ||||||||
P0.10 | USIC0_CH0. SELO1 | USIC0_CH1. SELO1 | USIC0_CH0. DX2C | USIC0_CH1. DX2C | ||||||||||
P0.11 | USIC0_CH0.MCLKOUT | USIC0_CH0. SELO2 | USIC0_CH1. SELO2 | USIC0_CH0. DX2D | USIC0_CH1. DX2D | |||||||||
P0.12 | USIC0_CH0. SELO3 | CCU40.IN0A | CCU40.IN1A | CCU40.IN2A | CCU40.IN3A | USIC0_CH0. DX2E | ||||||||
P0.13 | WWDT. SERVICE_OUT | USIC0_CH0. SELO4 | USIC0_CH0. DX2F | |||||||||||
P0.14 | USIC0_CH0. DOUT0 | USIC0_CH0. SCLKOUT | USIC0_CH0. DX0A | USIC0_CH0. DX1A | ||||||||||
P0.15 | USIC0_CH0. DOUT0 | USIC0_CH1.MCLKOUT | USIC0_CH0. DX0B | |||||||||||
P1.0 | CCU40.OUT0 | USIC0_CH0. DOUT0 | USIC0_CH0. DX0C | |||||||||||
P1.1 | VADC0. EMUX00 | CCU40.OUT1 | USIC0_CH0. DOUT0 | USIC0_CH1. SELO0 | USIC0_CH0. DX0D | USIC0_CH0. DX1D | USIC0_CH1. DX2E | |||||||
P1.2 | VADC0. EMUX01 | CCU40.OUT2 | USIC0_CH1. DOUT0 | USIC0_CH1. DX0B | ||||||||||
P1.3 | VADC0. EMUX02 | CCU40.OUT3 | USIC0_CH1. SCLKOUT | USIC0_CH1. DOUT0 | USIC0_CH1. DX0A | USIC0_CH1. DX1A | ||||||||
P1.4 | VADC0. EMUX10 | USIC0_CH1. SCLKOUT | USIC0_CH0. SELO0 | USIC0_CH1. SELO1 | USIC0_CH0. DX5E | USIC0_CH1. DX5E | ||||||||
P1.5 | VADC0. EMUX11 | USIC0_CH0. DOUT0 | USIC0_CH0. SELO1 | USIC0_CH1. SELO2 | USIC0_CH1. DX5F | |||||||||
P1.6 | VADC0. EMUX12 | USIC0_CH1.DOUT0 | USIC0_CH0.SCLKOUT | USIC0_CH0.SELO2 | USIC0_CH1.SELO3 | USIC0_CH0.DX5F | ||||||||
P2.0 | ERU0. PDOUT3 | CCU40.OUT0 | ERU0. GOUT3 | USIC0_CH0. DOUT0 | USIC0_CH0. SCLKOUT | VADC0. G0CH5 | ERU0.0B0 | USIC0_CH0. DX0E | USIC0_CH0. DX1E | USIC0_CH1. DX2F | ||||
P2.1 | ERU0. PDOUT2 | CCU40.OUT1 | ERU0. GOUT2 | USIC0_CH0. DOUT0 | USIC0_CH1. SCLKOUT | VADC0. G0CH6 | ERU0.1B0 | USIC0_CH0. DX0F | USIC0_CH1. DX3A | USIC0_CH1. DX4A | ||||
P2.2 | VADC0. G0CH7 | ERU0.0B1 | USIC0_CH0. DX3A | USIC0_CH0. DX4A | USIC0_CH1. DX5A | |||||||||
P2.3 | VADC0. G1CH5 | ERU0.1B1 | USIC0_CH0. DX5B | USIC0_CH1. DX3C | USIC0_CH1. DX4C | |||||||||
P2.4 | VADC0. G1CH6 | ERU0.0A1 | USIC0_CH0. DX3B | USIC0_CH0. DX4B | USIC0_CH1. DX5B | |||||||||
P2.5 | VADC0. G1CH7 | ERU0.1A1 | USIC0_CH0. DX5D | USIC0_CH1. DX3E | USIC0_CH1. DX4E | |||||||||
P2.6 | VADC0. G0CH0 | ERU0.2A1 | USIC0_CH0. DX3E | USIC0_CH0. DX4E | USIC0_CH1. DX5D | |||||||||
P2.7 | VADC0. G1CH1 | ERU0.3A1 | USIC0_CH0. DX5C | USIC0_CH1. DX3D | USIC0_CH1. DX4D | |||||||||
P2.8 | VADC0. G0CH1 | ERU0.3B1 | USIC0_CH0. DX3D | USIC0_CH0. DX4D | USIC0_CH1. DX5C | |||||||||
P2.9 | VADC0. G0CH2 | ERU0.3B0 | USIC0_CH0. DX5A | USIC0_CH1. DX3B | USIC0_CH1. DX4B | |||||||||
P2.10 | ERU0. PDOUT1 | CCU40.OUT2 | ERU0. GOUT1 | USIC0_CH1. DOUT0 | VADC0. G0CH3 | ERU0.2B0 | USIC0_CH0. DX3C | USIC0_CH0. DX4C | USIC0_CH1. DX0F | |||||
P2.11 | ERU0. PDOUT0 | CCU40.OUT3 | ERU0. GOUT0 | USIC0_CH1. SCLKOUT | USIC0_CH1. DOUT0 | VADC0. G0CH4 | ERU0.2B1 | USIC0_CH1. DX0E | USIC0_CH1. DX1E | |||||
Function | Outputs | Inputs | Pull Control | |||||
|---|---|---|---|---|---|---|---|---|
HWO0 | HWO1 | HWI0 | HWI1 | HW0_PD | HW0_PU | HW1_PD | HW1_PU | |
P0.0 | ||||||||
P0.1 | ||||||||
P0.2 | ||||||||
P0.3 | ||||||||
P0.4 | ||||||||
P0.5 | ||||||||
P0.6 | ||||||||
P0.7 | ||||||||
P0.8 | ||||||||
P0.9 | ||||||||
P0.10 | ||||||||
P0.11 | ||||||||
P0.12 | ||||||||
P0.13 | ||||||||
P0.14 | ||||||||
P0.15 | ||||||||
P1.0 | USIC0_CH0. DOUT0 | USIC0_CH0. HWIN0 | ||||||
P1.1 | USIC0_CH0. DOUT1 | USIC0_CH0. HWIN1 | ||||||
P1.2 | USIC0_CH0. DOUT2 | USIC0_CH0. HWIN2 | ||||||
P1.3 | USIC0_CH0. DOUT3 | USIC0_CH0. HWIN3 | ||||||
P1.4 | ||||||||
P1.5 | ||||||||
P1.6 | ||||||||
P2.0 | ||||||||
P2.1 | ||||||||
P2.2 | CCU40.OUT3 | |||||||
P2.3 | ||||||||
P2.4 | ||||||||
P2.5 | ||||||||
P2.6 | CCU40.OUT3 | |||||||
P2.7 | CCU40.OUT3 | |||||||
P2.8 | CCU40.OUT2 | |||||||
P2.9 | CCU40.OUT2 | |||||||
P2.10 | ||||||||
P2.11 | ||||||||
Electrical Parameters
This section provides the electrical parameters which are implementation-specific for the XMC1100.
General Parameters
Parameter Interpretation
The parameters listed in this section represent partly the characteristics of the XMC1100 and partly its requirements on the system. To aid interpreting the parameters easily when evaluating them for a design, they are indicated by the abbreviations in the “Symbol” column:
CC
Such parameters indicate
C
ontroller
C
haracteristics, which are distinctive feature of the XMC1100 and must be regarded for a system design.
SR
Such parameters indicate
S
ystem
R
equirements, which must be provided by the application system in which the XMC1100 is designed in.
Absolute Maximum Ratings
Stresses above the values listed under “Absolute Maximum Ratings” may cause permanent damage to the device. This is a stress rating only and functional operation of the device at these or any other conditions above those indicated in the operational sections of this specification is not implied. Exposure to absolute maximum rating conditions may affect device reliability.
Parameter | Symbol | Values | Unit | Note/Test Condition | ||
|---|---|---|---|---|---|---|
Min. | Typ. | Max. | ||||
Junction temperature | T
J SR | -40 | – | 115 | °C | – |
Storage temperature | T ST SR | -40 | – | 125 | °C | – |
Voltage on power supply pin with respect to V SSP | V
DDP SR | -0.3 | – | 6 | V | – |
Voltage on digital pins with respect to V SSP 2 | V
IN SR | -0.5 | – | V
DDP + 0.5 or max. 6 | V | whichever is lower |
Voltage on P2 pins with respect to V SSP 3 | V
INP2 SR | -0.3 | – | V
DDP + 0.3 | V | – |
Voltage on analog input pins with respect to V SSP | V
AIN V
AREF SR | -0.5 | – | V
DDP + 0.5 or max. 6 | V | whichever is lower |
Input current on any pin during overload condition | I
IN SR | -10 | – | 10 | mA | – |
Absolute maximum sum of all input currents during overload condition | Σ I IN SR | -50 | – | +50 | mA | – |
Pin Reliability in Overload
When receiving signals from higher voltage devices, low-voltage devices experience overload currents and voltages that go beyond their own IO power supplies specification.
defines overload conditions that will not cause any negative reliability impact if all the following conditions are met:
full operation life-time is not exceeded
Operating Conditions
are met for
pad supply levels (
V
DDP )
temperature
If a pin current is outside of the
Operating Conditions
but within the overload conditions, then the parameters of this pin as stated in the Operating Conditions can no longer be guaranteed. Operation is still possible in most cases but with relaxed parameters.
Parameter | Symbol | Values | Unit | Note/Test Condition | ||
|---|---|---|---|---|---|---|
Min. | Typ. | Max. | ||||
Input current on any port pin during overload condition | I
OV SR | -5 | – | 5 | mA | |
Absolute sum of all input circuit currents during overload condition | I
OVS SR | – | – | 25 | mA | |
shows the path of the input currents during overload via the ESD protection structures. The diodes against
V DDP
and ground are a simplified representation of these ESD protection structures.
Figure 9. Input Overload Current via ESD structures
and
Table 14
list input voltages that can be reached under overload conditions. Note that the absolute maximum input voltages as defined in the
Absolute Maximum Ratings
must not be exceeded during overload.
Pad Type | IOV = 5 mA |
|---|---|
Standard, High-current, AN/DIG_IN | V
IN = V DDP + 0.5 V V
AIN = V DDP + 0.5 V V
AREF = V DDP + 0.5 V |
P2.[1,2,6:9,11] | V
INP2 = V DDP + 0.3 V |
Pad Type | IOV = 5 mA |
|---|---|
Standard, High-current, AN/DIG_IN | V
IN = V SS - 0.5 V V
AIN = V SS - 0.5 V V
AREF = V SS - 0.5 V |
P2.[1,2,6:9,11] | V
INP2 = V SS - 0.3 V |
Operating Conditions
The following operating conditions must not be exceeded in order to ensure correct operation and reliability of the XMC1100. All parameters specified in the following tables refer to these operating conditions, unless noted otherwise.
Parameter | Symbol | Values | Unit | Note/Test Condition | ||
|---|---|---|---|---|---|---|
Min. | Typ. | Max. | ||||
Ambient Temperature | T A SR | -40 | – | 85 | °C | Temp. Range F |
-40 | – | 105 | °C | Temp. Range X | ||
Digital supply voltage 4 | V DDP SR | 1.8 | – | 5.5 | V | |
MCLK Frequency | f MCLK CC | – | – | 33.2 | MHz | CPU clock |
PCLK Frequency | f PCLK CC | – | – | 66.4 | MHz | Peripherals clock |
Short circuit current of digital outputs | I SC SR | -5 | – | 5 | mA | |
Absolute sum of short circuit currents of the device | Σ I SC_D SR | – | – | 25 | mA | |
DC Parameters
Input/Output Characteristics
provides the characteristics of the input/output pins of the XMC1100.
Note:
These parameters are not subject to production test, but verified by design and/or characterization.
Note:
Unless otherwise stated, input DC and AC characteristics, including peripheral timings, assume that the input pads operate with the standard hysteresis.
Parameter | Symbol | Limit Values | Unit | Note/Test Condition | ||
|---|---|---|---|---|---|---|
Min. | Max. | |||||
Output low voltage on port pins (with standard pads) | V OLP CC | – | 1.0 | V | I OL = 11 mA (5 V) I OL = 7 mA (3.3 V) | |
– | 0.4 | V | I OL = 5 mA (5 V) I OL = 3.5 mA (3.3 V) | |||
Output low voltage on high current pads | V OLP1 CC | – | 1.0 | V | I OL = 50 mA (5 V) I OL = 25 mA (3.3 V) | |
– | 0.32 | V | I OL = 10 mA (5 V) | |||
– | 0.4 | V | I OL = 5 mA (3.3 V) | |||
Output high voltage on port pins (with standard pads) | V OHP CC | V DDP - 1.0 | – | V | I OH = -10 mA (5 V) I OH = -7 mA (3.3 V) | |
V DDP - 0.4 | – | V | I OH = -4.5 mA (5 V) I OH = -2.5 mA (3.3 V) | |||
Output high voltage on high current pads | V OHP1 CC | V DDP - 0.32 | – | V | I OH = -6 mA (5 V) | |
V DDP - 1.0 | – | V | I OH = -8 mA (3.3 V) | |||
V DDP - 0.4 | – | V | I OH = -4 mA (3.3 V) | |||
Input low voltage on port pins (Standard Hysteresis) | V ILPS SR | – | 0.19 × V DDP | V | CMOS Mode (5 V, 3.3 V & 2.2 V) | |
Input high voltage on port pins (Standard Hysteresis) | V IHPS SR | 0.7 × V DDP | – | V | CMOS Mode (5 V, 3.3 V & 2.2 V) | |
Input low voltage on port pins (Large Hysteresis) | V ILPL SR | – | 0.08 × V DDP | V | CMOS Mode (5 V, 3.3 V & 2.2 V) 14 | |
Input high voltage on port pins (Large Hysteresis) | V IHPL SR | 0.85 × V DDP | – | V | CMOS Mode (5 V, 3.3 V & 2.2 V) 14 | |
Rise time on High Current Pad | t HCPR CC | – | 9 | ns | 50 pF @ 5 V | |
– | 12 | ns | 50 pF @ 3.3 V | |||
– | 25 | ns | 50 pF @ 1.8 V | |||
Fall time on High Current Pad 5 | t HCPF CC | – | 9 | ns | 50 pF @ 5 V 6 | |
– | 12 | ns | 50 pF @ 3.3 V 7 | |||
– | 25 | ns | 50 pF @ 1.8 V 8 | |||
Rise time on Standard Pad 5 | t R CC | – | 12 | ns | 50 pF @ 5 V | |
– | 15 | ns | 50 pF @ 3.3 V | |||
– | 31 | ns | 50 pF @ 1.8 V | |||
Fall time on Standard Pad 5 | t F CC | – | 12 | ns | 50 pF @ 5 V 9 | |
– | 15 | ns | 50 pF @ 3.3 V 10 | |||
– | 31 | ns | 50 pF @ 1.8 V 11 | |||
Input Hysteresis 12 | HYS CC | 0.08 × V DDP | – | V | CMOS Mode (5 V), Standard Hysteresis | |
0.03 × V DDP | – | V | CMOS Mode (3.3 V), Standard Hysteresis | |||
0.02 × V DDP | – | V | CMOS Mode (2.2 V), Standard Hysteresis | |||
0.5 × V DDP | 0.75 × V DDP | V | CMOS Mode(5 V), Large Hysteresis | |||
0.4 × V DDP | 0.75 × V DDP | V | CMOS Mode(3.3 V), Large Hysteresis | |||
0.2 × V DDP | 0.65 × V DDP | V | CMOS Mode(2.2 V), Large Hysteresis | |||
Pin capacitance (digital inputs/outputs) | C IO CC | – | 10 | pF | ||
Pull-up resistor on port pins | R PUP CC | 20 | 50 | kohm | V
IN = V SSP | |
Pull-down resistor on port pins | R PDP CC | 20 | 50 | kohm | V IN = V DDP | |
Input leakage current 13 | I OZP CC | -1 | 1 | µA | 0 < V IN < V DDP , T A ≤ 105°C | |
Voltage on any pin during V DDP power off | V PO SR | – | 0.3 | V | ||
Maximum current per pin (excluding P1, V DDP and V SS ) | I MP SR | -10 | 11 | mA | – | |
Maximum current per high current pins | I MP1A SR | -10 | 50 | mA | – | |
Maximum current into V DDP (TSSOP28/16, VQFN24) | I MVDD1 SR | – | 130 | mA | ||
Maximum current into V DDP (TSSOP38, VQFN40) | I MVDD2 SR | – | 260 | mA | ||
Maximum current out of V SS (TSSOP28/16, VQFN24) | I MVSS1 SR | – | 130 | mA | ||
Maximum current out of V SS (TSSOP38, VQFN40) | I MVSS2 SR | – | 260 | mA | ||
Analog to Digital Converters (ADC)
shows the Analog to Digital Converter (ADC) characteristics.
Note:
These parameters are not subject to production test, but verified by design and/or characterization.
Parameter | Symbol | Values | Unit | Note/Test Condition | ||
|---|---|---|---|---|---|---|
Min. | Typ. | Max. | ||||
Supply voltage range (internal reference) | V DD_int SR | 2.0 | – | 3.0 | V | SHSCFG.AREF = 11 CALCTR.CALGNSTC = 0C |
3.0 | – | 5.5 | V | SHSCFG.AREF = 10 | ||
Supply voltage range (external reference) | V DD_ext SR | 3.0 | – | 5.5 | V | SHSCFG.AREF = 00 |
Analog input voltage range | V AIN SR | VSSP - 0.05 | – | VDDP + 0.05 | V | |
Auxiliary analog reference ground | V REFGND SR | V SSP - 0.05 | – | 1.0 | V | G0CH0 |
Internal reference voltage (full scale value) | V REFINT CC | 5 | V | |||
Switched capacitance of an analog input | C AINS CC | – | 1.2 | 2 | pF | GNCTRxz.GAINy = 00(unity gain) |
– | 1.2 | 2 | pF | GNCTRxz.GAINy = 01 (gain g1) | ||
– | 4.5 | 6 | pF | GNCTRxz.GAINy = 10 (gain g2) | ||
– | 4.5 | 6 | pF | GNCTRxz.GAINy = 11 (gain g3) | ||
Total capacitance of an analog input | C AINT CC | – | – | 10 | pF | |
Total capacitance of the reference input | C AREFT CC | – | – | 10 | pF | |
Gain settings | G IN CC | 1 | – | GNCTRxz.GAINy = 00 (unity gain) | ||
3 | – | GNCTRxz.GAINy = 01 (gain g1) | ||||
6 | – | GNCTRxz.GAINy = 10 (gain g2) | ||||
12 | – | GNCTRxz.GAINy = 11 (gain g3) | ||||
Sample Time | t sample CC | 4 | – | – | 1/ f ADC | V DD = 5.0 V |
4 | – | – | 1/ f ADC | V DD = 3.3 V | ||
30 | – | – | 1/ f ADC | V DD = 2.0 V | ||
Sigma delta loop hold time | t SD_hold CC | 20 | – | – | μs | Residual charge stored in an active sigma delta loop remains available |
Conversion time in fast compare mode | t CF CC | 9 | 1/ f ADC | |||
Conversion time in 12-bit mode | t C12 CC | 20 | 1/ f ADC | |||
Maximum sample rate in 12-bit mode | f C12 CC | – | – | f ADC /43.5 | – | 1 sample pending |
– | – | f ADC /63.5 | – | 2 samples pending | ||
Conversion time in 10-bit mode | t C10 CC | 18 | 1/ f ADC | |||
Maximum sample rate in 10-bit mode 17 | f C10 CC | – | – | f ADC /41.5 | – | 1 sample pending |
– | – | f ADC /59.5 | – | 2 samples pending | ||
Conversion time in 8-bit mode | t C8 CC | 16 | 1/ f ADC | |||
Maximum sample rate in 8-bit mode 17 | f C8 CC | – | – | f ADC /38.5 | – | 1 sample pending |
– | – | f ADC /54.5 | – | 2 samples pending | ||
RMS noise 18 | EN RMS CC | – | 1.5 | – | LSB12 | DC input, V DD = 5.0 V, V AIN = 2.5 V, 25°C |
DNL error | EA DNL CC | – | ±2.0 | – | LSB12 | |
INL error | EA INL CC | – | ±4.0 | – | LSB12 | |
Gain error with external reference | EA GAIN CC | – | ±0.5 | – | % | SHSCFG.AREF = 00 (calibrated) |
Gain error with internal reference 19 | EA GAIN CC | – | ±3.6 | – | % | SHSCFG.AREF = 1X (calibrated), -40°C - 105°C |
– | ±2.0 | – | % | SHSCFG.AREF = 1X (calibrated), 0°C - 85°C | ||
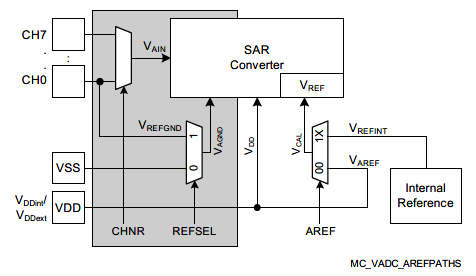
Offset error | EA OFF CC | – | ±8.0 | – | mV | Calibrated, V DD = 5.0 V |
Figure 10. ADC Voltage Supply
Temperature Sensor Characteristics
Note:
These parameters are not subject to production test, but verified by design and/or characterization.
Parameter | Symbol | Values | Unit | Note/Test Condition | ||
|---|---|---|---|---|---|---|
Min. | Typ. | Max. | ||||
Measurement time | t
M CC | – | – | 10 | ms | |
Temperature sensor range | T
SR SR | -40 | – | 115 | °C | |
Sensor Accuracy 20 | T
TSAL CC | -6 | – | 6 | °C | T
J > 20°C |
-10 | – | 10 | °C | 0°C ≤ T J ≤ 20°C | ||
-18 | – | 18 | °C | -25°C ≤ T J < 0°C | ||
-31 | – | 31 | °C | -40°C ≤ T J < -25°C | ||
Start-up time after enabling | t
TSSTE SR | – | – | 15 | μs | |
Power Supply Current
The total power supply current defined below consists of a leakage and a switching component.
Application relevant values are typically lower than those given in the following tables, and depend on the customer's system operating conditions (e.g. thermal connection or used application configurations).
Note:
These parameters are not subject to production test, but verified by design and/or characterization.
Parameter | Symbol | Values | Unit | Note/Test Condition | ||
|---|---|---|---|---|---|---|
Min. | Typ. 21 | Max. | ||||
Active mode current Peripherals enabled f MCLK / f PCLK in MHz 22 | I DDPAE CC | – | 8.4 | 11.0 | mA | 32/64 |
– | 7.3 | – | mA | 24/48 | ||
– | 6.1 | – | mA | 16/32 | ||
– | 5.1 | – | mA | 8/16 | ||
– | 3.7 | – | mA | 1/1 | ||
Active mode current Peripherals disabled f MCLK / f PCLK in MHz 23 | I DDPAD CC | – | 4.7 | – | mA | 32/64 |
– | 4.1 | – | mA | 24/48 | ||
– | 3.3 | – | mA | 16/32 | ||
– | 2.6 | – | mA | 8/16 | ||
– | 1.5 | – | mA | 1/1 | ||
Active mode current Code execution from RAM Flash is powered down f MCLK / f PCLK in MHz | I DDPAR CC | – | 6.3 | – | mA | 32/64 |
– | 5.4 | – | mA | 24/48 | ||
– | 4.6 | – | mA | 16/32 | ||
– | 3.8 | – | mA | 8/16 | ||
– | 3.0 | – | mA | 1/1 | ||
Sleep mode current Peripherals clock enabled f MCLK / f PCLK in MHz 24 | I DDPSE CC | – | 5.9 | – | mA | 32/64 |
5.4 | – | mA | 24/48 | |||
4.8 | – | mA | 16/32 | |||
4.3 | – | mA | 8/16 | |||
3.7 | – | mA | 1/1 | |||
Sleep mode current Peripherals clock disabled Flash active f MCLK / f PCLK in MHz 25 | I DDPSD CC | – | 1.8 | – | mA | 32/64 |
1.7 | – | mA | 24/48 | |||
1.6 | – | mA | 16/32 | |||
1.5 | – | mA | 8/16 | |||
1.4 | – | mA | 1/1 | |||
Sleep mode current Peripherals clock disabled Flash powered down f MCLK / f PCLK in MHz 26 | I DDPSR CC | – | 1.2 | – | mA | 32/64 |
1.1 | – | mA | 24/48 | |||
1.0 | – | mA | 16/32 | |||
0.8 | – | mA | 8/16 | |||
0.7 | – | mA | 1/1 | |||
Deep Sleep mode current 27 | I DDPDS CC | – | 0.24 | – | mA | |
Wake-up time from Sleep to Active mode 28 | t SSA CC | – | 6 | – | cycles | |
Wake-up time from Deep Sleep to Active mode 29 | t DSA CC | – | 280 | – | μsec | |
shows typical graphs for active mode supply current for
V
DDP
= 5 V,
V
DDP
= 3.3 V,
V
DDP
= 1.8 V across different clock frequencies.
Figure 11. Active mode, a) peripherals clocks enabled, b) peripherals clocks disabled: Supply current IDDPA over supply voltage VDDP for different clock frequencies
shows typical graphs for sleep mode current for
V
DDP
= 5 V,
V
DDP
= 3.3 V,
V
DDP
= 1.8 V across different clock frequencies.
Figure 12. Sleep mode, peripherals clocks disabled, Flash powered down: Supply current IDDPSR over supply voltage VDDP for different clock frequencies
provides the active current consumption of some modules operating at 5 V power supply at 25°C. The typical values shown are used as a reference guide on the current consumption when these modules are enabled.
Active Current Consumption | Symbol | Limit Values | Unit | Note/Test Condition |
|---|---|---|---|---|
Typ. | ||||
Baseload current | I CPUDDC | 5.04 | mA | Modules including Core, SCU, PORT, memories, ANATOP 30 |
VADC and SHS | I ADCDDC | 3.4 | mA | Set CGATCLR0.VADC to 1 31 |
USIC0 | I USIC0DDC | 0.87 | mA | Set CGATCLR0.USIC0 to 1 32 |
CCU40 | I CCU40DDC | 0.94 | mA | Set CGATCLR0.CCU40 to 1 33 |
WDT | I WDTDDC | 0.03 | mA | Set CGATCLR0.WDT to 1 34 |
RTC | I RTCDDC | 0.01 | mA | Set CGATCLR0.RTC to 1 35 |
Flash Memory Parameters
Note:
These parameters are not subject to production test, but verified by design and/or characterization.
Parameter | Symbol | Values | Unit | Note/Test Condition | ||
|---|---|---|---|---|---|---|
Min. | Typ. | Max. | ||||
Erase Time per page/sector | t ERASE CC | 6.8 | 7.1 | 7.6 | ms | |
Program time per block | t PSER CC | 102 | 152 | 204 | μs | |
Wake-Up time | t WU CC | – | 32.2 | – | μs | |
Read time per word | t a CC | – | 50 | – | ns | |
Data Retention Time | t RET CC | 10 | – | – | years | Max. 100 erase/program cycles |
Flash Wait States 36 | N WSFLASH CC | 0 | 0 | 0 | fMCLK = 8 MHz | |
0 | 1 | 1 | fMCLK = 16 MHz | |||
1 | 1.3 | 2 | fMCLK = 32 MHz | |||
Fixed Flash Wait States configured in bit NVM_NVMCONF.WS | N FWSFLASH SR | 0 | 0 | 1 | NVM_CONFIG1.FIXWS = 1 , fMCLK ≤ 16 MHz | |
1 | 1 | 1 | NVM_CONFIG1.FIXWS = 1 , 16 MHz < fMCLK ≤ 32 MHz | |||
Erase Cycles | N ECYC CC | – | – | 5*10 4 | cycles | Sum of page and sector erase cycles |
Total Erase Cycles | N TECYC CC | – | – | 2*10 6 | cycles | |
AC Parameters
Testing Waveforms
Figure 13. Rise/Fall Time Parameters
Figure 14. Testing Waveform, Output Delay
Figure 15. Testing Waveform, Output High Impedance
Power-Up and Supply Monitoring Characteristics
provides the characteristics of the supply monitoring in XMC1100.
The guard band between the lowest valid operating voltage and the brownout reset threshold provides a margin for noise immunity and hysteresis. The electrical parameters may be violated while
V
DDP
is outside its operating range.
The brownout detection triggers a reset within the defined range. The prewarning detection can be used to trigger an early warning and issue corrective and/or fail-safe actions in case of a critical supply voltage drop.
Note:
These parameters are not subject to production test, but verified by design and/or characterization.
Parameter | Symbol | Values | Unit | Note/Test Condition | ||
|---|---|---|---|---|---|---|
Min. | Typ. | Max. | ||||
V DDP ramp-up time | t RAMPUP SR | V DDP /S VDDPrise | – | 10 7 | μs | |
V DDP slew rate | S VDDPOP SR | 0 | – | 0.1 | V/μs | Slope during normal operation |
S VDDP10 SR | 0 | – | 10 | V/μs | Slope during fast transient within +/-10% of V DDP | |
S VDDPrise SR | 0 | – | 10 | V/μs | Slope during power-on or restart after brownout event | |
S VDDPfall 38 SR | 0 | – | 0.25 | V/μs | Slope during supply falling out of the +/-10% limits 39 | |
V DDP prewarning voltage | V DDPPW CC | 2.1 | 2.25 | 2.4 | V | ANAVDEL.VDEL_SELECT = 00 |
2.85 | 3 | 3.15 | V | ANAVDEL.VDEL_SELECT = 01 | ||
4.2 | 4.4 | 4.6 | V | ANAVDEL.VDEL_SELECT = 10 | ||
V DDP brownout reset voltage | V DDPBO CC | 1.55 | 1.62 | 1.75 | V | calibrated, before user code starts running |
V DDP voltage to ensure defined pad states | V DDPPA CC | – | 1.0 | – | V | |
Start-up time from power-on reset | t SSW SR | – | 320 | – | μs | Time to the first user code instruction in all start-up modes 40 |
BMI program time | t BMI SR | – | 8.25 | – | ms | Time taken from a user-triggered system reset after BMI installation is requested |
Figure 16. Supply Threshold Parameters
On-Chip Oscillator Characteristics
Note:
These parameters are not subject to production test, but verified by design and/or characterization.
provides the characteristics of the 64 MHz clock output from the digital controlled oscillator, DCO1 in XMC1100.
Parameter | Symbol | Limit Values | Unit | Note/Test Condition | ||
|---|---|---|---|---|---|---|
Min. | Typ. | Max. | ||||
Nominal frequency | f NOM CC | – | 64 | – | MHz | under nominal conditions 41 after trimming |
Accuracy 42 | Δ f LT CC | -1.7 | – | 3.4 | % | with respect to f NOM (typ), over temperature (0°C to 85°C) |
-3.9 | – | 4.0 | % | with respect to f NOM (typ), over temperature (-40°C to 105°C) | ||
shows the typical curves for the accuracy of DCO1, with and without calibration based on temperature sensor, respectively.
Figure 17. Typical DCO1 accuracy over temperature
provides the characteristics of the 32 kHz clock output from digital controlled oscillators, DCO2 in XMC1100.
Parameter | Symbol | Limit Values | Unit | Note/Test Condition | ||
|---|---|---|---|---|---|---|
Min. | Typ. | Max. | ||||
Nominal frequency | f NOM CC | – | 32.75 | – | kHz | under nominal conditions 43 after trimming |
Accuracy | Δ f LT CC | -1.7 | – | 3.4 | % | with respect to f NOM (typ), over temperature (0°C to 85°C) |
-3.9 | – | 4.0 | % | with respect to f NOM (typ), over temperature (-40°C to 105°C) | ||
Serial Wire Debug Port (SW-DP) Timing
The following parameters are applicable for communication through the SW-DP interface.
Note:
These parameters are not subject to production test, but verified by design and/or characterization.
Parameter | Symbol | Values | Unit | Note/Test Condition | ||
|---|---|---|---|---|---|---|
Min. | Typ. | Max. | ||||
SWDCLK high time | t 1 SR | 50 | – | 500000 | ns | – |
SWDCLK low time | t 2 SR | 50 | – | 500000 | ns | – |
SWDIO input setup to SWDCLK rising edge | t 3 SR | 10 | – | – | ns | – |
SWDIO input hold after SWDCLK rising edge | t 4 SR | 10 | – | – | ns | – |
SWDIO output valid time after SWDCLK rising edge | t 5 CC | – | – | 68 | ns | C L = 50 pF |
– | – | 62 | ns | C L = 30 pF | ||
SWDIO output hold time from SWDCLK rising edge | t 6 CC | 4 | – | – | ns | |
Figure 18. SWD Timing
SPD Timing Requirements
The optimum SPD decision time between
0
and
1
is 0.75 µs. With this value the system has maximum robustness against frequency deviations of the sampling clock on tool and on device side. However it is not always possible to exactly match this value with the given constraints for the sample clock. For instance for a oversampling rate of 4, the sample clock will be 8 MHz and in this case the closest possible effective decision time is 5.5 clock cycles (0.69 µs).
Sample Freq. | Sampling Factor | Sample Clocks 0 | Sample Clocks 1 | Effective Decision Time 44 | Remark |
|---|---|---|---|---|---|
8 MHz | 4 | 1 to 5 | 6 to 12 | 0.69 µs | The other closest option (0.81 µs) for the effective decision time is less robust. |
For a balanced distribution of the timing robustness of SPD between tool and device, the timing requirements for the tool are:
Frequency deviation of the sample clock is +/- 5%
Effective decision time is between 0.69 µs and 0.75 µs (calculated with nominal sample frequency)
Peripheral Timings
Note:
These parameters are not subject to production test, but verified by design and/or characterization.
Synchronous Serial Interface (USIC SSC) Timing
The following parameters are applicable for a USIC channel operated in SSC mode.
Note:
Operating Conditions apply.
Parameter | Symbol | Values | Unit | Note/Test Condition | ||
|---|---|---|---|---|---|---|
Min. | Typ. | Max. | ||||
SCLKOUT master clock period | t CLK CC | 62.5 | – | – | ns | |
Slave select output SELO active to first SCLKOUT transmit edge | t 1 CC | 80 | – | – | ns | |
Slave select output SELO inactive after last SCLKOUT receive edge | t 2 CC | 0 | – | – | ns | |
Data output DOUT[3:0] valid time | t 3 CC | -10 | – | 10 | ns | |
Receive data input DX0/DX[5:3] setup time to SCLKOUT receive edge | t 4 SR | 80 | – | – | ns | |
Data input DX0/DX[5:3] hold time from SCLKOUT receive edge | t 5 SR | 0 | – | – | ns | |
Parameter | Symbol | Values | Unit | Note/Test Condition | ||
|---|---|---|---|---|---|---|
Min. | Typ. | Max. | ||||
DX1 slave clock period | t CLK SR | 125 | – | – | ns | |
Select input DX2 setup to first clock input DX1 transmit edge | t 10 SR | 10 | – | – | ns | |
Select input DX2 hold after last clock input DX1 receive edge 45 | t 11 SR | 10 | – | – | ns | |
Receive data input DX0/DX[5:3] setup time to shift clock receive edge 45 | t 12 SR | 10 | – | – | ns | |
Data input DX0/DX[5:3] hold time from clock input DX1 receive edge 45 | t 13 SR | 10 | – | – | ns | |
Data output DOUT[3:0] valid time | t 14 CC | – | – | 80 | ns | |
Figure 19. USIC - SSC Master/Slave Mode Timing
Note:
This timing diagram shows a standard
configuration, for which the slave select signal is low-active, and the serial clock signal
is not shifted and not inverted.
Inter-IC (IIC) Interface Timing
The following parameters are applicable for a USIC channel operated in IIC mode.
Note:
Operating Conditions apply.
Parameter | Symbol | Values | Unit | Note/Test Condition | ||
|---|---|---|---|---|---|---|
Min. | Typ. | Max. | ||||
Fall time of both SDA and SCL | t 1 CC/SR | – | – | 300 | ns | |
Rise time of both SDA and SCL | t 2 CC/SR | – | – | 1000 | ns | |
Data hold time | t 3 CC/SR | 0 | – | – | µs | |
Data set-up time | t 4 CC/SR | 250 | – | – | ns | |
LOW period of SCL clock | t 5 CC/SR | 4.7 | – | – | µs | |
HIGH period of SCL clock | t 6 CC/SR | 4.0 | – | – | µs | |
Hold time for (repeated) START condition | t 7 CC/SR | 4.0 | – | – | µs | |
Set-up time for repeated START condition | t 8 CC/SR | 4.7 | – | – | µs | |
Set-up time for STOP condition | t 9 CC/SR | 4.0 | – | – | µs | |
Bus free time between a STOP and START condition | t 10 CC/SR | 4.7 | – | – | µs | |
Capacitive load for each bus line | C b SR | – | – | 400 | pF | |
Parameter | Symbol | Values | Unit | Note/Test Condition | ||
|---|---|---|---|---|---|---|
Min. | Typ. | Max. | ||||
Fall time of both SDA and SCL | t 1 CC/SR | 20 + 0.1* C b 48 | – | 300 | ns | |
Rise time of both SDA and SCL | t 2 CC/SR | 20 + 0.1* C b | – | 300 | ns | |
Data hold time | t 3 CC/SR | 0 | – | – | µs | |
Data set-up time | t 4 CC/SR | 100 | – | – | ns | |
LOW period of SCL clock | t 5 CC/SR | 1.3 | – | – | µs | |
HIGH period of SCL clock | t 6 CC/SR | 0.6 | – | – | µs | |
Hold time for (repeated) START condition | t 7 CC/SR | 0.6 | – | – | µs | |
Set-up time for repeated START condition | t 8 CC/SR | 0.6 | – | – | µs | |
Set-up time for STOP condition | t 9 CC/SR | 0.6 | – | – | µs | |
Bus free time between a STOP and START condition | t 10 CC/SR | 1.3 | – | – | µs | |
Capacitive load for each bus line | C b SR | – | – | 400 | pF | |
Figure 20. USIC IIC Stand and Fast Mode Timing
Inter-IC Sound (IIS) Interface Timing
The following parameters are applicable for a USIC channel operated in IIS mode.
Note:
Operating Conditions apply.
Parameter | Symbol | Values | Unit | Note/Test Condition | ||
|---|---|---|---|---|---|---|
Min. | Typ. | Max. | ||||
Clock period | t 1 CC | 2/ f MCLK | – | – | ns | V DDP ≥ 3 V |
4/ f MCLK | – | – | ns | V DDP < 3 V | ||
Clock HIGH | t 2 CC | 0.35 × t 1min | – | – | ns | |
Clock Low | t 3 CC | 0.35 × t 1min | – | – | ns | |
Hold time | t 4 CC | 0 | – | – | ns | |
Clock rise time | t 5 CC | – | – | 0.15 × t 1min | ns | |
Figure 21. USIC IIS Master Transmitter Timing
Parameter | Symbol | Values | Unit | Note/Test Condition | ||
|---|---|---|---|---|---|---|
Min. | Typ. | Max. | ||||
Clock period | t 6 SR | 4/ f MCLK | – | – | ns | |
Clock HIGH | t 7 SR | 0.35 × t 6min | – | – | ns | |
Clock Low | t 8 SR | 0.35 × t 6min | – | – | ns | |
Set-up time | t 9 SR | 0.2 × t 6min | – | – | ns | |
Hold time | t 10 SR | 10 | – | – | ns | |
Figure 22. USIC IIS Slave Receiver Timing
Package and Reliability
The XMC1100 is a member of the XMC1000 Family of microcontrollers. It is also compatible to a certain extent with members of similar families or subfamilies.
Each package is optimized for the device it houses. Therefore, there may be slight differences between packages of the same pin-count but for different device types. In particular, the size of the exposed die pad may vary.
If different device types are considered or planned for an application, it must be ensured that the board layout fits all packages under consideration.
Package Parameters
provides the thermal characteristics of the packages used in XMC1100.
Parameter | Symbol | Limit Values | Unit | Package Types | |
|---|---|---|---|---|---|
Min. | Max. | ||||
Exposed Die Pad Dimensions | Ex × Ey CC | – | 2.7 × 2.7 | mm | PG-VQFN-24-19 |
– | 3.7 × 3.7 | mm | PG-VQFN-40-13 | ||
Thermal resistance Junction-Ambient | R ΘJA CC | – | 104.6 | K/W | PG-TSSOP-16-8 |
– | 70.3 | K/W | PG-TSSOP-38-9 49 | ||
– | 46.0 | K/W | PG-VQFN-24-19 49 | ||
– | 38.4 | K/W | PG-VQFN-40-13 49 | ||
Note:
For electrical reasons, it is required to connect the exposed pad to the board ground VSSP, independent of EMC and thermal requirements.
Thermal Considerations
When operating the XMC1100 in a system, the total heat generated in the chip must be dissipated to the ambient environment to prevent overheating and the resulting thermal damage.
The maximum heat that can be dissipated depends on the package and its integration into the target board. The “Thermal resistance
R
ΘJA
” quantifies these parameters. The power dissipation must be limited so that the average junction temperature does not exceed 115°C.
The difference between junction temperature and ambient temperature is determined by
Δ
T
= (
P
INT
+
P
IOSTAT
+
P
IODYN
) ×
R
ΘJA
The internal power consumption is defined as
P INT
=
V
DDP
×
I
DDP
(switching current and leakage current).
The static external power consumption caused by the output drivers is defined as
P IOSTAT
= Σ((
V
DDP
-
V
OH
) ×
I
OH
) + Σ(
V
OL
×
I
OL
)
The dynamic external power consumption caused by the output drivers (
P
IODYN
) depends on the capacitive load connected to the respective pins and their switching frequencies.
If the total power dissipation for a given system configuration exceeds the defined limit, countermeasures must be taken to ensure proper system operation:
Reduce
V
DDP
, if possible in the system
Reduce the system frequency
Reduce the number of output pins
Reduce the load on active output drivers
Package Outlines
Figure 23. PG-TSSOP-38-9
Figure 24. PG-TSSOP-16-8
Figure 25. PG-VQFN-24-19
Figure 26. PG-VQFN-40-13
All dimensions in mm.
Quality Declaration
shows the characteristics of the quality parameters in the XMC1100.
Parameter | Symbol | Limit Values | Unit | Notes | |
|---|---|---|---|---|---|
Min. | Max. | ||||
ESD susceptibility according to Human Body Model (HBM) | V HBM SR | – | 4000 | V | Conforming to EIA/JESD22-A114-B |
ESD susceptibility according to Charged Device Model (CDM) pins | V CDM SR | – | 1000 | V | Conforming to JESD22-C101-C |
Moisture sensitivity level | MSL CC | – | – | – | JEDEC J-STD-020D |
| 3 | ||||
| 1 | ||||
Soldering temperature | T SDR SR | – | 260 | °C | Profile according to JEDEC J-STD-020D |
Revision History
Document revision | Date | Description of changes |
|---|---|---|
V1.8 | 2016-09 | In Absolute Maximum Ratings renamed parameter V CM to V INP2 , as the limitation is related to most P2 pins, also if no ACMP is available. Clarified limit to pins P2.[1,2,6:9,11] in Overload specification. |
V1.9 | 2025-01-22 | Updated template. Updated Moisture sensitivity level in Quality Declaration section. |
V2.0 | 2025-04-22 | Updated On-Chip Memories in Summary of Features section. Added XMC1100-T038X0128 and XMC1100-T038X0200 in Table 1 and Table 4 . Updated the block diagram to show 64k to 200K. |
V2.1 | 2025-06-30 | Updated ESD ratings in Table 34 |
1
Features that are not included in this table are available in all the derivatives.
2
Excluding port pins P2.[1,2,6,7,8,9,11].
3
Applicable to port pins P2.[1,2,6,7,8,9,11].
5
Rise/Fall time parameters are taken with 10% - 90% of supply.
12
Hysteresis is implemented to avoid meta stable states and switching due to internal ground bounce. It cannot be guaranteed that it suppresses switching due to external system noise.
13
An additional error current (
I
INJ
) will flow if an overload current flows through an adjacent pin.
14
However, for applications with strict low power-down current requirements, it is mandatory that no active voltage source is supplied at any GPIO pin when
V
DDP
is powered off.
16
No pending samples assumed, excluding sampling time and calibration.
17
Includes synchronization and calibration (average of gain and offset calibration).
18
This parameter can also be defined as an SNR value: SNR[dB] = 20 × log(
A
MAXeff
/
N
RMS
).
With
A
MAXeff
= 2N/2, SNR[dB] = 20 × log (2048/
N
RMS
) [N = 12].
N RMS
= 1.5 LSB12, therefore, equals SNR = 20 × log (2048/1.5) = 62.7 dB.
19
Includes error from the reference voltage.
20
The temperature sensor accuracy is independent of the supply voltage.
22
CPU and all peripherals clock enabled, Flash is in active mode.
23
CPU enabled, all peripherals clock disabled, Flash is in active mode.
24
CPU in sleep, all peripherals clock enabled and Flash is in active mode.
25
CPU in sleep, Flash is in active mode.
26
CPU in sleep, Flash is powered down and code executed from RAM after wake-up.
27
CPU in sleep, peripherals clock disabled, Flash is powered down and code executed from RAM after wake-up.
28
CPU in sleep, Flash is in active mode during sleep mode.
29
CPU in sleep, Flash is in powered down mode during deep sleep mode.
30
Baseload current is measured with device running in user mode, MCLK=PCLK=32 MHz, with an endless loop in the flash memory. The clock to the modules stated in CGATSTAT0 are gated.
31
Active current is measured with: module enabled, MCLK=32 MHz, running in auto-scan conversion mode.
32
Active current is measured with: module enabled, alternating messages sent to PC at 57.6 kbaud every 200 ms.
33
Active current is measured with: module enabled, MCLK=PCLK=32 MHz, 1 CCU4 slice for PWM switching from 1500 Hz and 1000 Hz at regular intervals, 1 CCU4 slice in capture mode for reading period and duty cycle.
34
Active current is measured with: module enabled, MCLK=32 MHz, time-out mode; WLB = 0, WUB = 0x00008000; WDT serviced every 1 s.
35
Active current is measured with: module enabled, MCLK=32 MHz, Periodic interrupt enabled.
36
Flash wait states are automatically inserted by the Flash module during memory read when needed. Typical values are calculated from the execution of the Dhrystone benchmark program.
37
Not all parameters are 100% tested, but are verified by design/characterization.
38
A capacitor of at least 100 nF has to be added between
V
DDP
and
V
SSP
to fulfill the requirement as stated for this parameter.
39
Valid for a 100 nF buffer capacitor connected to supply pin where current from capacitor is forwarded only to the chip. A larger capacitor value has to be chosen if the power source sink a current.
40
This values does not include the ramp-up time. During start-up firmware execution, MCLK is running at 32 MHz and the clocks to peripheral as specified in register CGATSTAT0 are gated.
42
The accuracy of the DCO1 oscillator can be further improved through alternative methods, refer to XMC1000 Oscillator Handling Application Note.
45
These input timings are valid for asynchronous input signal handling of slave select input, shift clock input, and receive data input (bits DXnCR.DSEN = 0).
46
Due to the wired-AND configuration of an IIC bus system, the port drivers of the SCL and SDA signal lines need to operate in open-drain mode. The high level on these lines must be held by an external pull-up device, approximately 10 kOhm for operation at 100 kbit/s, approximately 2 kOhm for operation at 400 kbit/s.
47
Due to the wired-AND configuration of an IIC bus system, the port drivers of the SCL and SDA signal lines need to operate in open-drain mode. The high level on these lines must be held by an external pull-up device, approximately 10 kOhm for operation at 100 kbit/s, approximately 2 kOhm for operation at 400 kbit/s.
49
Device mounted on a 4-layer JEDEC board (JESD 51-5); exposed pad soldered.